


摘要:跟着煤矿主动化、才智矿山的快速开展,作业面支架电液控体系的功用也愈加杂乱。为了满意支架电液控体系在实时姿势操控、数据传输以及与作业面采煤机、刮板机、视频监控等体系联动方面的要求,本文依据LPC4320异构双核处理器开发一种新式支架操控器。既有强壮的数据处理才能,满意多通道传感器实时信号收集与处理以及依据数字信号的支架操控功用的需求,又具有强壮的操控才能,完结支架长途操控、主动操控、多设备联动操控等功用。
导言
起源于国外的液压支架电液控体系在上世纪90年代引进国内,支架电液控体系以高产、高效、安全的特色在国内敏捷得到了推行与运用。本世纪初,郑煤机、北京天玛等国内厂家在支架电液控体系范畴相继获得要害打破,支架电液控体系在国内的开展进入了一个新阶段。国产电液控体系在承继进口电液控体系高产、高效、安全特色的一起,本钱得到了大幅下降,进一步拉近了用户与支架电液控体系的间隔。现在,数字化矿山、才智矿山等研讨的进一步深化,对综采作业面支架电液控体系的智能化和主动化程度均提出了更高的要求。支架电液控体系不只要完结对支架的立柱下腔压力、推移行程、红外线接纳器等惯例传感器的实时数据收集,还要具有对姿势传感器、高度传感器、挨近传感器等新式传感器的实时数据收集与处理;不只要完结支架、采煤机、刮板机的三机联动主动割煤,还要具有与作业面视频体系、支架长途操控体系的联动与操控才能。综采作业面主动化需求的日益进步,要求支架电液控体系不只要具有动作操控才能,还要具有很多数据的实时传输、各种传感器的数据收集与信号处理才能,而现在的51单片机、ARM7等微操控器很难一起满意高性能数字信号处理才能、很多数据传输与I/O操控的要求。NXP公司推出的LPC4320微操控器在单芯片内无缝集成了Cotex—M4与Cotex—M0两个处理器,能够很好地满意支架电液控体系对高性能数字信号处理与很多数据传输与I/O操控的要求。
1 LPC4320双核处理器
LPC4320是NXP公司针对数字信号操控推出的一款异构双核数字信号操控器(DSC),其M4与M0内核运转速度均可达204 MHz,运用M4强壮的数字信号才能与M0的操控才能,可认为DSP与MCU运用供给单一的架构与开发环境。在LPCA320芯片中,M4作为主处理器交融了微操控器的基本功用,如集成向量操控器(NVIC)、低功耗形式、低本钱调试和易用性,以及高性能数字信号处理功用,如单指令周期MAC、单指令多数据(SI MI))技能、饱满算法、浮点运算单元。M0作为协处理器用来分管M4的很多数据传输与I/O操控使命,减小M4带宽占用,使得M4能够全力处理数字信号操控运用中的数学核算。
LPC4320异构双核数字信号处理器的共同之处在于其片内集成了M4与M0,并为两者拓荒了同享的存储空间及中止,能够完结无缝衔接。依据此架构,M4作为主处理器能够运转嵌入式操作体系,首要担任各种传感器的信号收集、处理、依据数字信号操控的数学运算等使命,并担任对M0处理器的操控与初始化作业;M0作为协处理器,相同能够运转嵌入式操作体系,在M4主处理器的操控下担任完结通讯、I/O操控,数据转移、存储及人机交互操控等使命。以上M4与M0能够独自运转嵌入式操作体系,真实完结多使命一起运转,进步体系运转的实时性及吞吐量。
LPC4320不只具有双核处理器的优势,还具有CAN总线、UART等通讯接口以及ADC、GPIO等丰厚的外设。归纳考虑硬件性能与软件开发的难度,笔者决议以LPC4320为中心开发新一代液压支架操控器。
2 体系计划规划
2.1 作业面体系计划规划
为了完结对每台支架的操控,咱们在每台支架上装置一个支架操控单元,每个支架操控单元由支架操控器、电磁阀驱动器、压力传感器、行程传感器、红外线接纳器、挨近传感器、姿势传感器等组成。支架操控单元间经过架间电缆相衔接,辅以隔爆兼本安型稳压电源、阻隔耦合器等组成作业面的支架电液控体系网络,体系计划如图1所示。
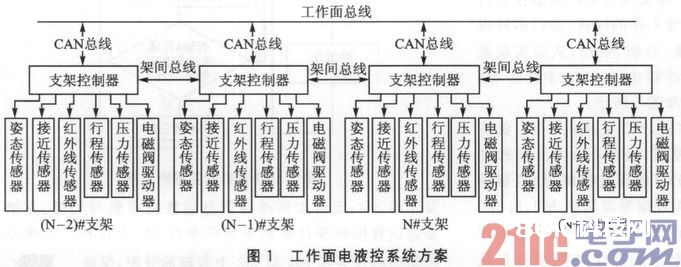
在作业面支架电液控体系网络中,作业面总线用于支架操控单元与顺槽集控中心的通讯,架间总线用于相邻的支架操控单元间的通讯,两条总线经过软件完结彼此冗余。在支架操控单元中支架操控器是中心,完结支架操作、指令、数据传输及传感器数据收集以及人机交互等功用,因而,本规划重点是支架操控器的软、硬件规划。
2.2 支架操控器计划规划
支架操控器计划规划如图2所示。
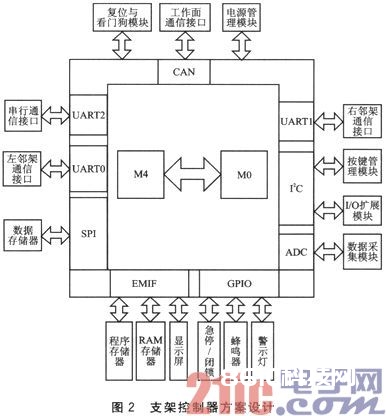
在该规划中,LPC4320作为体系的数据处理与体系操控的主控单元,选用1路CAN总线作为作业面通讯的接口,2路UART总线作为左/右邻架的通讯接口,然后完结作业面通讯与左/右邻架通讯的冗余规划;选用其ADC收集外部模仿量传感器的数据,并预留1路UART总线来接入数字量传感器;选用ZLG7290作为按键办理芯片,与LPC4320和I2C进行接口;选用MAX7300作为I/O扩展芯片,经过I2C与LPC4320完结多达24功用的电磁阀驱动;一起还为体系扩展了程序存储器、数据存储器以及显示屏等模块,来完结电液控体系运转需求具有的人机交互、电磁阀操控、数据传输以及存储等功用。
3 依据双核通讯的软件架构规划
3.1 双核通讯的软、硬件完结
为了完结M4与M0双核间的通讯,LPC4320依据两者间的同享RAM与中止,完结两者间的中止告诉、数据传递。双核间的通讯原理如图3所示。
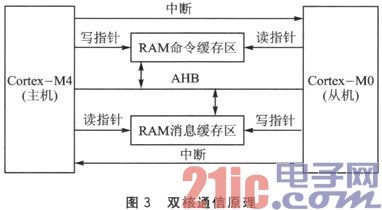
M4与M0别离运用中止来告诉对方有新的事情到来,需求对方处理。M4运用指令缓存区向M0传递指令,M0运用音讯缓存区向M4传递数据,然后完结两者内核间的高效通讯。
依据中止及同享RAM的双核间通讯有以下3种方法:中止机制、音讯行列机制和邮箱机制。中止机制是最简略的双核通讯方法,用于一个内核向另一个内核发送一个无关联数据确实认信号。音讯行列机制运用同享RAM中的两块区域,用来存储一个内核向另一个内核发送的音讯。其间指令缓存区用于M4向M0发送指令,音讯缓存区用于M0向M4回发音讯。音讯邮箱机制在同享RAM中运用了占位符,然后完结发送方直接将音讯放置到接纳方的同享RAM中,这样M4和M0都能够向对方发送音讯。
3.2 体系软件架构规划
因为支架操控器需求完结传感器数据收集与处理、左/右邻架通讯传输、作业面通讯、I/O端口操控、数据存储、人机交互等功用,这就需求依据M4和M0处理器的特色合理进行软件功用的区分,以完结支架操控器在进行数据传输、数据存储、人机交互等作业的一起,进行多种模仿、数字传感器数据的数据收集、剖析、处理,然后完结依据多种传感器的支架数字信号操控功用。M4主机和M0从机软件体系流程别离如图4和图5所示。

体系软件架构中,M4是主机,M0是从机。M4担任对M0进行复位、程序加载等操控,运转在M4上的软件与运转在M0上的软件选用RPC(长途过程调用)机制进行调用。M4仅仅将需求处理的数据等发送给M0,由M0来完结耗时较长的数据发送、存储等处理;M0同步接纳外部的通讯和人机交互等耗时较长的事情,并将事情信息发送给M4;而比如传感器信息的数据收集与处理、支架姿势运算操控等核算密集型使命在M4上运转。这样不同类型的使命在M4与M0上合理地分配,确保体系运转的实时性与高效性。
结语
经验证,以LPC4320双核处理器为中心的支架操控器,在传感器数据收集与处理方面,特别是以倾角传感器数据收集与处理为根底的支架姿势信息核算方面,相对于常用的单片机体系的实时性得到了大幅提高,很好地满意了依据数字信号的支架实时姿势操控。在多通道数据传输方面,相对于一般的单核体系数据传输的实时性也有显着的提高。可是,因为双核体系需求为M4和M0两个子体系别离开发相应的软件体系,这就对体系的软件架构规划提出了更高的要求,对体系中依据双核通讯的RPC(长途过程调用)接口规划也提出了更高的要求。






