


摘要:车地通讯体系在工业机车自动化中发挥重要作用,是列车安全可靠运转的要害。文中剖析了感应无线通讯原理,规划了一种依据感应无线技能与TMS320F28335 DSP芯片的DPSK车地通讯用解调器,具体论述了体系的硬件组成和电路规划技能问题,给出体系软件流程图。该体系通过测验,具有杰出的安稳性和可靠性,满意工业机车车地通讯要求。
0 导言
在工业生产中,要完结大型移动机车方位实时检测与自动化操控,车地通讯设备功能具有非常重要的含义。感应无线技能是一项针对工业生产中大型移动机车自动化而研发的工业使用技能,首要包含依据感应无线的机车方位检测技能和车地数据通讯技能。感应无线数据通讯是通过安装在机车底部的天线箱与敷设在地上轨迹旁的编码电缆间的电磁耦合完结信息传递,因为通讯间隔较短,通讯的质量较高。感应无线技能在工业机车自动化和轨迹交通范畴有广泛的使用远景。文中提出了一种依据感应无线技能的车地通讯调制解调器规划方案,以TMS320F28335芯片为中心规划了一种DPSK解调器完结车地通讯。
1 感应无线数据通讯原理
图1给出了感应无线数据通讯体系的结构框图。体系首要由中央操控室的调制解调器、编码电缆、机车上的天线箱和调制解调器构成。天线箱由接纳线圈和发送线圈构成,编码电缆中具有通讯用传输对线。编码电缆安装在机车轨迹周围,在机车行走过程中,安装在机车上底部的天线箱跟从机车移动,并一向与编码电缆坚持 5-20cm间隔,数据通讯便是通过安装在移动机车上的天线箱中线圈与敷设在地上轨迹旁的编码电缆中的通讯传输对线之间近间隔电磁耦合传递信息,天线箱与编码电缆之间形成了一个间隔很短的无线通讯信道,完结中央操控室与移动机车之间的数据通讯。
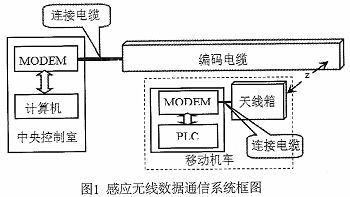
为了按捺搅扰,特别是按捺同频搅扰噪声(机车上的变频调速设备发生的且与感应无线数据通讯载波频率相同或附近的谐波),编码电缆通讯传输对线和车上接纳天线均选用穿插结构,衰减搅扰噪声,天线箱线圈与编码电缆中通讯传输对线结构如图2所示。

假定每个天线线圈或许编码电缆网孔宽度为,发送线圈中心违背L0和L1的中心分别为,d0,d1。r=d0+d1因为天线箱线圈和编码电缆之间间隔短,能够把它们之间的磁场看成是均匀磁场。若发送线圈中鼓励电流为i=Imsinωt,则L0和L1的组成感应电动势e为:
![]()
其间Emax为发送线圈中心和L0或L1线圈网孔中心重合时,感应电动势到达的最大值。
2 硬件规划
从硬件视点而言,整个体系包含首要包含TMS320F28335 DSP、CPLD操控模块(DPSK调制模块)、信号调度电路、功率扩大模块、RS-485通讯接口、输入输出模块、JTAG接口以及电源办理模块等。图 3所示为体系的硬件规划框图。其间S0、S1是无线感应信号,是已调信号。
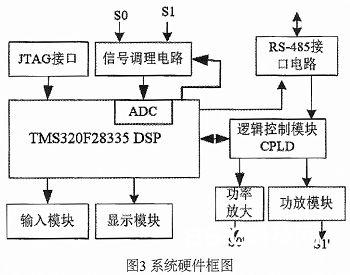
因为调制部分相对简单,下面要点论述解调部分硬件电路和软件规划规划。
2.1 主控模块
该车地通讯体系的主控模块选用的是32位的高功能DSC芯片TMS320F28335,主频达150MHz,片上带有256K字FLASH,34K字 SARAM,1K字OTPROM。片上集成了3个32位CPU守时器,16通道12位高速ADC,6通道的DMA操控器,以及UART、SPI、PWM、 GPIO等,片上外围设备资源丰富。
在该体系中,TMS320F28335 DSP首要作业有:在解调时,操控其片上12bit ADC进行采样,依据ADC采样的信号操控程控扩大器(PGA)将感应信号调度到合适的起伏,对采样后信号进行数字处理与软件解调,解调后的信号通过 RS-485总线送给上位机。在调制时,DSP通过中止方法接纳RTS以及每帧数据的开始位,发生操控信号操控CPLD构成的调制模块输出DPSK脉冲信号,用户能够通过按键、显示器等人机交互设备完结通讯参数的装备。
2.2 感应信号扩大模块
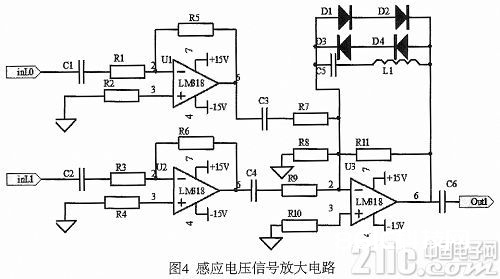
两路通过天线箱线圈或许编码电缆感应接纳信号inL1与inL0通过运放U1和U2构成的反相扩大电路完结阻抗匹配和扩大后,经由U3构成的反相加法电路完结inL1和inL0两路信号的矢量组成,且经D1,D2,D3,D4,C5,L1构成双向限幅电路与滤波。该根本扩大电路输出送PGA模块进一步扩大。
2.3 有源带通滤波电路
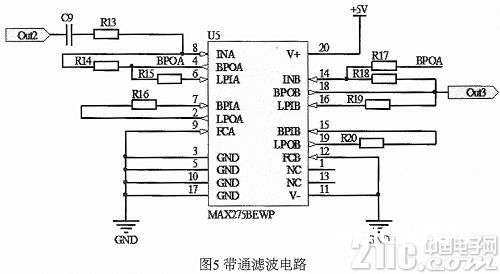
因为在工业现场环境杂乱,搅扰较多,因而在模仿前端规划了依据开关%&&&&&%滤波芯片MAX275的4阶带通滤波器,如图5所示。该带通滤波器规划目标为:中心频率约为79k Hz,品质因数Q约为10,增益约为1.31。
2. 4 程控扩大模块
因为轨迹机车在运动中天线箱和编码电缆之间的相对方位是改变的,感应信号起伏不安稳,因而在信号调度模块中使用了程控扩大器,使感应信号起伏坚持相对安稳。程控扩大模块选用了D/A转化器AD7524与运放LM318构成,如图6所示。

假定DSP供给给AD7524的当时操控量为,当时的ADC对信号起伏均匀采样值为,PGACon_Now,ADCSamp_Now假定需求将信号起伏(即ADC采样值)操控在ADCSamp_Max和ADCSamp_ Min之间,其间值为ADCSamp_Med,满意:
ADCSamp_Med=(ADCSamp_Min+ADCSamp_Max)/2 (2)
当采样起伏超出其极限时,DSP发生新的操控量算法为:
![]()
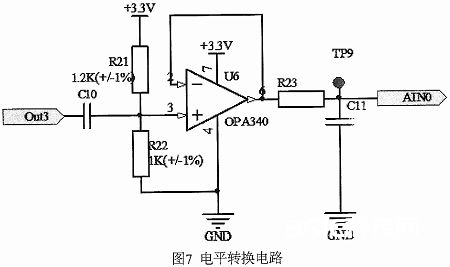
2.5 电平转化模块
因为带通滤波器的输出是双极性沟通讯号,而TMS320F28335片上ADC要求的输入是单极性信号,且电压范围在0~3V,因而带通滤波器的输出不能直接作为ADC的输入,需求将带通滤波器的输出进行电平转化才干送ADC。图7所示为电平转化电路,将沟通讯号电平进步1.5V,使VAIN0契合ADC 输入要求。是带通滤波输出,范围在-1.5V~+1.5V。R 21,R22选用精细电阻,其间R22=1KΩ,R21=1.2KΩ。
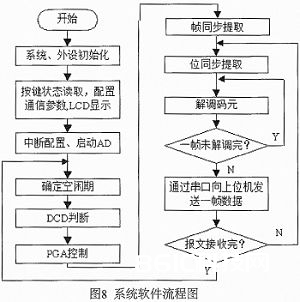
3 软件规划
体系软件首要包含上电后体系与外设初始化、检测按键状况完结对通讯参数的装备、中止装备以及解调算法模块等。其间中止首要包含CPU守时器0和1中止,外部中止1和2中止等,它们首要用于供给CPLD构成的DPSK调制电路操控时序。解调算法首要包含确认闲暇期、DCD确认、PGA操控、帧同步和位同步提取等算法。体系软件流程图如图8所示。
为了进步体系的可靠性与抗搅扰才能,使用了TMS320F28335片上看门狗,在软件中组织喂狗指令,若体系呈现死机等,守时周期内没有喂狗,看门狗复位体系,防止体系呈现一向处于死机状况。
4 总结
该体系规划在软硬件规划上均选用了抗搅扰规划,进步了体系的安稳性与抗搅扰才能。规划中选用TI公司TMS320F28335 DSP芯片为中心,通过软件无线电方法完结DPSK解调,完结工业机车与操控中心的实时数据通讯,体系晋级仅仅软件的晋级,对工业机车自动化具有重要含义。现在,该体系通过实践测验,具有三种通讯速率(2400bps,4800 bps,9600bps),自动增益操控,误码率低于,彻底兼容现在的同类产品。






