


摘要:运用嵌入式技能、无线传输技能和图画处理技能,规划方针查找飞翔器,为防灾救灾供给技能服务。体系包含手持终端和飞翔器,选用 ARM11架构的S3C6410微处理器,移植Linux操作体系。飞翔器带着摄像头收集图画并紧缩,经过wifi传输到手持终端,在本地的TFT液晶屏显现;一起手持终端向飞翔器发送操控指令,飞翔器依据指令操控本身的运动和摄像头的滚动。试验结果标明,收集的图画明晰、指令履行及时牢靠,能够较好地完结方针勘探、查找等使命。
关键词:飞翔器;方针查找;无线通讯;图画收集
近年来大规模的灾祸、事端频发,对人类的生命和产业形成极大损害,及时、有用地投入防灾救灾可大大下降灾祸丢失,研讨高效的救援查找设备具有特别重要的含义。跟着科技的行进,新式技能成为救援的取胜法宝,尤其是飞翔机器人技能。因具有灵敏、重量轻、以及可深化风险区域作业等优势,查找飞翔器在灾后救援作业中起着越来越重要的效果,此类飞翔器需求具有安稳的运动操控、收集多种环境信息、以及无线操控等功用。可见,查找飞翔器需考虑完结的功用多、触及技能广、环境状况不确定等要素,因而存在规划难、可扩展性差、短少丰厚的通讯才能、研讨本钱高级问题。
针对以上问题,文中依据飞翔机器人体系的可扩展、可裁剪、以及互操作等特性,选用模块化办法规划并完结一个飞翔机器人原型体系.经过无线通讯完结飞翔器操控及数据传输,以完结方针勘探、查找以及安全监控等功用。
1 方针查找飞翔器体系规划
1.1 硬件体系结构
方针查找飞翔器须具有必定的飞翔速度、低能耗、飞翔安稳性、习惯多样的环境勘探,以及有悬停、笔直升降升才能。其间,飞翔移动载体的结构简略,可省去杂乱的机械规划,且运动速度快,可削减方针查找时刻。为此,选用四轮旋翼飞翔方法,增强飞翔器的移动才能。
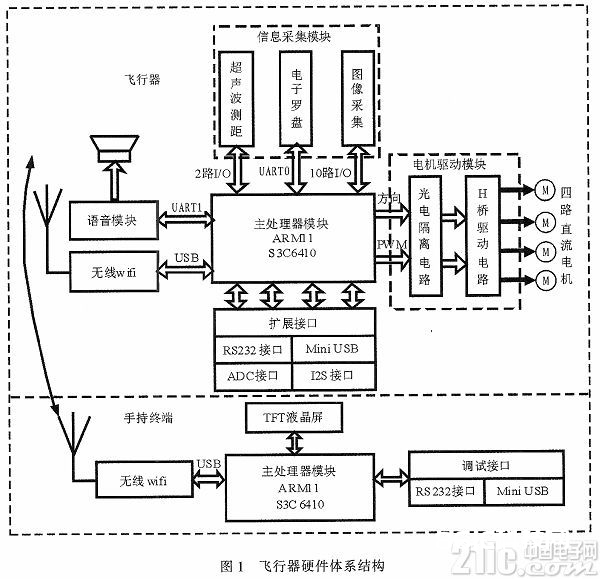
方针查找飞翔器包含手持操控终端和飞翔机器人两部分,两者之间经过wifi无线通讯方法传输图画和操控信息;飞翔器运用带着的摄像头收集图画并进行紧缩,经过wifi传输给手持终端,手持终端对接纳到的图画进行解压后在本地的TFT液晶屏显现。用户可依据显现的图画信息,运用可视化触控界面向飞翔器发送飞翔操控指令,飞翔器接纳到操控
指令后进行解析,然后据此指令调理电机驱动电路,操控直流电机的滚动、启停,完结飞翔器的行进、转向、升降、悬停等运动,一起飞翔器的主处理器可操控摄像头180°的滚动,以调整拍摄角度。语音模块能够在飞翔器查找到方针信息后进行报警提示。此外,飞翔器上还带有超声测距、电子罗盘等传感器,在飞翔的进程中经过这些传感器供给的信息自我调整飞翔运动。手持终端和飞翔器主操控板选用ARM11架构的S3C6410微处理器作为操控中心,软件上作业Linux 操作体系,首要完结无线数据收发、图画数据处理、电机操控信号输出等功用。飞翔器硬件体系结构如图1所示。
1.2 方针查找功用模型
在方针勘探、查找进程中,触及的操控操作较多,各功用模块间的调用联系较杂乱。为此,选用的UML进行模型剖析,完结运用程序功用模型规划,树立体系操效果例图(Use—Case)。体系被笼统为操作员、飞翔器和手持终端3部分,操作员经过操作手持操控终端与飞翔器进行对话。软件的运用程序功用模型如图2所示。
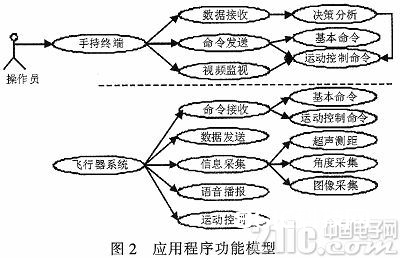
飞翔器体系首要完结以下功用:
1)指令接纳:接纳操控终端的指令。指令分为根本指令和电机操控指令。前者操控电机驱动板输出;后者操控机器人根本行为,例如开端收集、中止收集等。
2)数据发送:将收集到的数据经过无线网卡发送给手持式操控终端。
3)信息收集:传感器勘探包含图画、障碍物间隔以及作业方向等信息。
4)语音播报:飞翔器查找到方针时进行语音报警动作。
5)运动操控:完结行进,转向,升降,启停等根本功用。
2 体系完结
2.1 电源
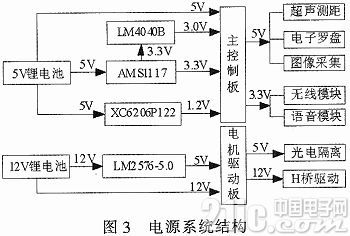
为了使移动机器人运动便利,有必要自带电源。其间,飞翔器操控电路选用5 V直流供电,电机驱动部分则需求12V直流供电,为了削减操控电路遭到电机运动的搅扰,选用独立供电方法。主操控板功率耗费较小,经过LDO芯片AMS1117、LM4040B、XC6206P122等来完结3.3 V、3.0 V及1.2 V电压转化;而电机板功率耗费较大,为了进步运用功率,经过开关电源LM2576完结5 V电压输出。电源转化电路如图3所示。
2.2 电机驱动
电机驱动电路由H桥和光电阻隔电路两部分组成,选用4片LMD18200H桥芯片完结飞翔器的四路直流电机操控。为进步抗搅扰性,主控芯片与电机驱动扩大电路之间经过光电耦合器完结阻隔。S3C6410从GPIO输出操控信号,经低速光耦TLP521光电阻隔后输出给LMD18200,操控电机的启停;因为S3C6410的PWM输出信号频率较高,选用高速光耦6N137完结信号阻隔,操控电机的作业速度。电机驱动电路如图4所示。

2.3 无线传输
无线通讯模块选用的是依据RT2571/RT73芯片的54MUSB无线网卡,契合IEEE 802.11b和IEEE 802.11g标准。手持操控终端和飞翔器之间选用对等式(Ad—Hoc)的方法进行
通讯,装备两边的无线网卡的作业形式为对等式形式,在Linux操作体系下选用socket套接字树立TCP衔接,完结图画和指令信息的交互。
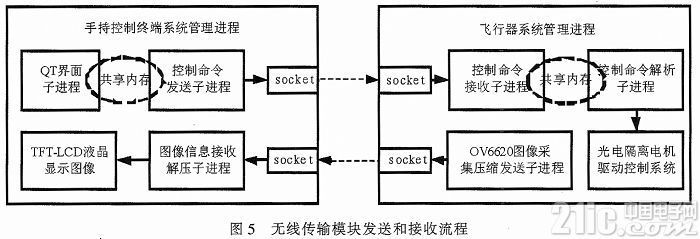
主处理器经过USB端口操控无线模块的数据收发。无线传输模块首要完结两个使命:1)手持式终端向飞翔器发送操控指令;2)飞翔器回传图画数据至手持终端。飞翔器体系的软件规划选用了多使命并发方法履行,飞翔器体系无线数据传输、处理的进程如下:
1)发送流程:手持操控终端的QT界面获取操作人员的按键信息,并经过同享内存将按键值传给操控指令发送进程,该进程经过socket套接字,将指令信息发送给现场机器人的操控指令接纳子进程,该进程对指令进行解析,经过调整四路PWM输出占空比,然后操控飞翔器的作业。
2)接纳流程:现场机器人的图画收集子进程将收集到的图画进行紧缩后经过socket套接字发送至手持操控终端,由图画接纳子进程接纳并对图画信息进行解压等处理,然后在本地液晶屏上进行显现。无线传输的软件作业结构如图5所示。
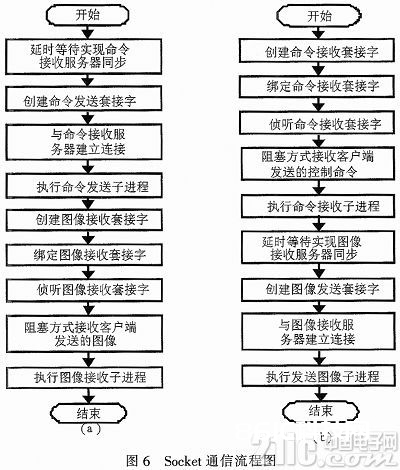
手持操控终端作为客户端向现场飞翔器服务器发送操控指令,所以要延时等候现场飞翔器服务器的树立,当传输操控指令的C/S形式树立完结后,飞翔器要作为客户端向手持操控终端发送图画信息,就有必要延时等候手持式操控终端服务器的树立,等候传输图画信息的C/S形式树立,手持操控终端的套接字流程如图6(a) 所示,现场机器人的套接字流程如图6(b)所示。
2.4 图画收集
远间隔查找和勘探方针时,经过监测图画判别是否查找到方针,选用CMOS图画传感器OV6620完结图画收集。主处理器经过I2C接口初始化OV6620设置,外部中止接口衔接芯片的场中止信号及行中止信号,8位数据端收集图画数据。图画数据的收集首要由场中止VSYNC信号符号一幅图画开端,行中止信号HREF符号一幅图画的每行的开端,信号PCLK则代表了每个像素点的时序。装备OV6620的为RGB565图画输出格局,依据液晶显现640*480收集图画数据,需求60万Byte RAM空间。
依据ARM渠道的图画收集模块的软件部分选用的是依据S3C6410硬件渠道的V4L2视频驱动开发,V4L2子体系包含用户态,内核和硬件3个部分。用户空间担任为运用程序供给拜访设备的接口,Video_core担任屏蔽底层硬件的差异,为运用程序供给一致的设备接口,Video驱动担任详细设备的初始化,装备不同类型的摄像头的收集进程。
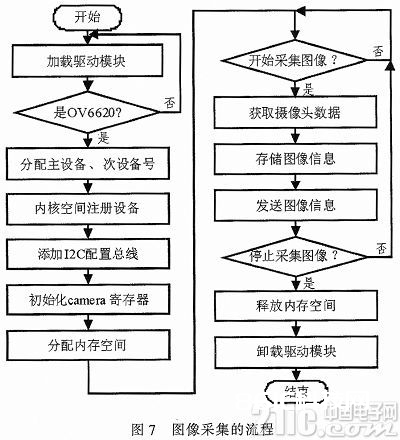
V4L2为Linux下的视频设备程序供给了一套接口标准,选用流水线的作业方法,遵从翻开视频设备,设置格局,请求内存,处理数据,封闭设备的 Linux字符驱动规划方法。L inux下OV6620摄像头驱动归于字符类设备,它能够像字节省相同被拜访,且只能够次序读写,OV6620摄像头的驱动流程如图7所示,体系首要加载驱动模块,匹配OV6620硬件设备,向体系中注册字符设备,经过I2C初始化摄像头寄存器,并分配相应的内存空间,开端收集发送图画,完结后开释相应的资源。
3 结束语
试验标明,以模块化方针查找飞翔器试验渠道在试验环境中能够较好地完结方针查找使命。整个体系选用半自主操控方法,飞翔器自主导航,收集环境、方针图画信息,传输至操控终端。操控终端依此进行决议计划,决议飞翔器的运动操控,终究完结勘探、查找方针等功用,确保了查找区域的掩盖,完结了有用、快速的勘探、查找功用。






