


IMU可获得载体的姿势、速度和位移等信息,被广泛用于轿车、机器人范畴,也被用于需求用姿势进行精细位移核算的场合,如潜艇、飞机等惯性导航设备中。依据MEMS技能的IMU,以及MEMS惯性传感器,将是未来开展的要点。
惯性丈量单元Inertial measurement unit,简称IMU,是丈量物体三轴姿势角(或角速率)及加速度的设备。陀螺仪和加速度计,是惯性导航体系的中心设备。凭借内置的加速度传感器和陀螺仪,IMU可丈量来自三个方向的线性加速度和旋转角速率,通过解算可获得载体的姿势、速度和位移等信息。

IMU模块
IMU的界说及功用
依据美国IEEE协会正在修订的P1559号规范,慣性丈量单元被界说为“无需外部参阅的可丈量三维线运动及角运动的设备”。一般状况下,每套惯性丈量设备包括三组陀螺仪和加速度传感器,别离丈量三个自由度的角加速度和线加速度,通过对加速度的积分和初始速度、方位的叠加运算,得到物体在空间方位中的运动方向和速度,结合惯性导航体系内的运动轨迹设定,对航向和速度进行批改以完成导航功用。
现在来说,市面上存在的IMU以6轴与9轴为主。6轴IMU包括一个三轴加速度传感器,一个三轴陀螺仪;9轴IMU则多了一个三轴的磁力计。别的,关于选用MEMS技能的IMU,一般还内置有温度计进行实时的温度校准。
无论是6轴或9轴IMU,都可实时的输出三维的角速度信号与加速度信号,以此解算出物体的当时姿势。这在在渠道安稳与导航中有着重要的使用价值。
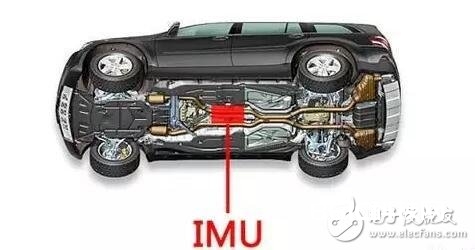
轿车上的IMU设备
IMU的广泛使用
IMU大多用在需求进行运动操控的设备,如轿车和机器人上,也被用于需求用姿势进行精细位移核算的场合,如潜艇、飞机、导弹和航天器的惯性导航设备等。与其他导航体系比较, 惯导体系一起具有信息全面、彻底自主、高度荫蔽、信息实时与接连, 且不受时刻、地域的约束和人为要素搅扰等重要特性,可在空中、水中、地劣等各种环境中正常作业。
例如,IMU的上述优势,在主动驾驶体系中体现的尤为显着。在主动驾驶体系中,IMU可作为其他传感器数据缺失时的有用弥补。通过核算车辆的姿势(俯仰角和翻滚角)、航向、速度和方位改变,IMU可用于添补GNSS信号更新之间的空白,乃至可在GNSS和体系中的其他传感器失效时,进行航位核算。因而,作为一个独立的数据源,IMU可用于短期导航,并验证来自其他传感器的信息。

主动驾驶体系中的IMU使用
IMU的作业原理
IMU的原理和黑私自走小碎步很类似。在黑私自,因为自己对步长的估量和实践走的间隔存在差错,走的步数越来越多时,自己估量的方位与实践的方位相差会越来越远。走第一步时,估量方位与实践方位还比较挨近;但随着步数增多,估量方位与实践方位的不同越来越大。依据此办法推行到三维,便是惯性丈量单元的原理。
学术上的表述是:以牛顿力学规律为根底,通过丈量载体在惯性参阅系的加速度,将它对时刻进行积分,且把它变换到导航坐标系中,就可以得到在导航坐标系中的速度、偏航角和方位等信息。
惯性传感器商场
惯性传感器的开展状况直接决议了惯性导航体系的开发和使用,惯性传感器本身的本钱、体积和功耗影响了惯性导航体系的相应参数目标。惯性丈量传感器的开展需求权衡以下几个要素:精确性、接连性、可靠性、本钱、体积/分量、功耗。
现在,在惯性导航的下流民用商场,惯性传感器的使用涵盖了大地丈量、石油钻井、电子交通、轿车安全、消费电子等范畴,其间MEMS惯性传感器在消费级商场使用范畴最为广泛。一起,体积小、价格低廉的MEMS惯性传感器和高精度、高功能传感器,将是未来开展的要点。

集成有IMU的高铁轨迹检测小车,材料图
依据MEMS技能的IMU开展趋势
现在,依据MEMS加工工艺的IMU的技能开展趋势,首要体现在以下三个方面:
1.向高度集成化方向开展。在民用使用范畴,使用外表工艺在单芯片上完成多轴陀螺仪、加速度传感器、数字处理电路等功用部件、组件的一体集成。
2.向高功能方向开展。进一步改进传感器、加速度传感器功能,优化全体结构方式,进步惯性丈量设备的功能和环境适应性。
3.向组合化方向开展。鉴于现在依据MEMS技能的IMU尚处于中低精度,且其导航定位差错随时刻的累积而添加。因而,IMU一般与其他定位差错不随时刻累积的导航定位体系,例如GPS、多普勒雷达、地形匹配等技能相组合,从而完成组合导航,这也其未来的一个重要开展趋势。
延伸阅览:ACEINNA公司推出新式惯性丈量单元产品
日前,惯性丈量技能提供商ACEINNA推出新款OpenIMU300RI惯性丈量单元(IMU),坚固耐用、可开源,且内置了九自由度(9-DOF)惯性传感器技能,可用于主动越野、修建、农业和轿车等。比方,可直接设备在修建和农用车辆上。
该IMU可削减总线上的通讯,为处理器腾出空间做其他的工作,乃至还可选用更廉价的处理器。IMU或通过处理的IMU数据,可用于许多使用,例如让驾驶室坚持水平状况、让操作臂回到特定方位、在跋涉时坚持铲斗安稳、为安全使用锁定操控设备、弥补GNSS数据以让拖拉机坚持跋涉方向等。
来历:传感器专家网






