


Microchip高档营销工程师-II
Nelson Alexander
根据选用无传感器磁场定向操控(FOC)的永磁同步电机(PMSM)的高档电机操控体系快速遍及,这种现象的背面有两个首要驱动要素:进步能效和加强产品的差异化。尽管有依据标明选用无传感器FOC的PMSM能够完成这两个方针,但需求一个可供给全体完成办法的规划生态体系才干取得成功。运用全体的生态体系,规划人员能够战胜完成进程中阻止体系选用的各种应战。
为什么挑选PMSM?
PMSM电机是一种运用电子换向的无刷电机。它常常与无刷直流电机(BLDC)混杂,后者是无刷电机系列的另一个成员,也运用电子换向,但在结构上略有不同。PMSM的结构可针对FOC进行优化,而BLDC电机经过优化后可运用6步换向技能。经过优化后,PMSM可取得正弦波反电动势(Back-EMF),而BLDC电机则取得梯形波反电动势。
这些电机各自运用的转子方位传感器也不同。PMSM一般运用一个方位编码器进行操作,而BLDC电机则运用三个霍尔传感器进行操作。假如考虑到本钱,规划人员能够考虑施行无传感器技能,以省去磁体、传感器、连接器和接线的本钱。去除传感器还有助于进步牢靠性,因为这会削减体系中或许发生毛病的元件数量。当比较无传感器PMSM和无传感器BLDC时,运用FOC算法的无传感器PMSM可供给更超卓的功用,而运用相似硬件规划的完本钱钱适当。
转用PMSM的最大受益者是那些现在正在运用有刷直流(BDC)或沟通感应电机(ACIM)的运用。切换的首要优点包括具有更低的功耗、更高的速度、更平稳的转矩、更低的可闻噪音、更长的运用寿命和更细巧的尺度,从而使运用更具竞争力。可是,要想完成运用PMSM的这些优点,开发人员需求完成更杂乱的FOC操控技能以及其他运用特定算法,才干满意体系需求。尽管PMSM比BDC或ACIM的本钱愈加贵重,但它具有更多优势。
完成中的应战
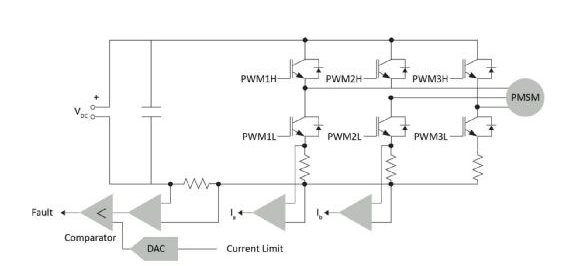
图1:运用三相电压源逆变器的三相无传感器PMSM操控体系
可是,要完成运用PMSM的优势,需求了解完成高档FOC电机操控技能时固有的硬件杂乱性,一起还需求把握这一范畴的专业知识。图1给出了运用三相电压源逆变器的三相无传感器PMSM操控体系。操控逆变器需求三对彼此相关的高分辨率PWM信号,以及很多需求信号调度的模仿反应信号。此体系还需求硬件维护功用来完成容错,一起运用高速模仿比较器完成了快速呼应。完成传感、操控和维护所需的这些额定模仿元件添加了解决方案的本钱,而典型的BDC电机规划或简略的ACIM每赫兹电压(V/F)操控并不需求这些元件。
此外,还有为PMSM电机操控运用界说元件规范和进行验证所需的开发时刻。 要应对这些应战,规划人员能够挑选一款适宜的单片机,以完成与专为PMSM电机操控量身定制的器材规范的高度模仿集成。这将会削减所需的外部元件数量并优化物料清单(BOM)。高度集成的电机操控器材现已具有高分辨率PWM,可简化高档操控算法、用于精细丈量和信号调度的高速模仿外设、功用安全所需的硬件外设,以及用于通讯和调试的串行接口的完成。
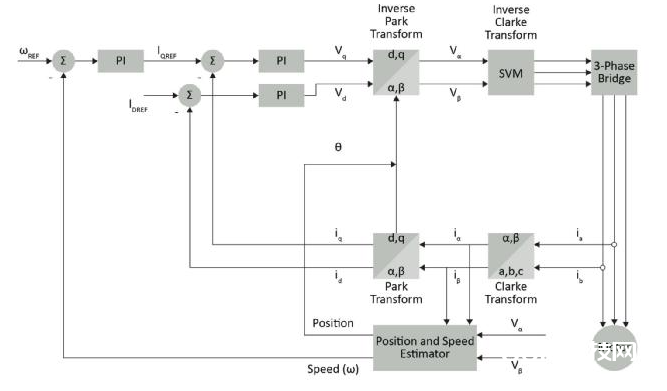
图2:规范无传感器FOC的框图
此外,还有一个较大的应战,即电机操控软件与电机的电机械行为之间的交互。图2给出了规范的无传感器FOC框图。要将其从概念改变为实践的规划,需求了解操控器架构和数字信号处理器(DSP)指令,以完成数学核算密布的时刻要害操控环。
为完成牢靠的功用,操控环有必要在一个PWM周期内履行。有必要对操控环的时刻进行优化,详细包括以下三个原因:
1) 束缚:运用不低于20 kHz的PWM开关频率(时长为50 μs),以按捺来自逆变器开关的噪声。
2) 为完成带宽更高的操控体系,操控环有必要在一个PWM周期内履行。
3) 为支撑其他后台任务(如体系监督、运用特定功用和通讯),操控环需求以更快的速度运转。因而,FOC算法的方针应该是在10 μs以内履行。
许多制造商供给了运用无传感器预算器来预算转子方位的FOC软件示例。可是,在使电机开端滚动之前,FOC算法有必要装备各种参数以匹配电机和硬件。有必要对操控参数和系数进行进一步优化,以满意所需的速度和功率方针。能够经过结合以下办法完成这一方针:1) 运用电机数据手册取得参数;2) 重复进行实验。电机数据手册并不能一直对电机参数进行精确的表征,或许规划人员无法取得高精度丈量设备,在这种情况下,开发人员将不得不凭借重复实验的办法。这种手动调整的进程需求时刻和经历。
PMSM电机用于许多不同的运用,运转在不同的环境中,或许存在不同的规划束缚。例如,在轿车散热器电扇中,当电机行将发动时,因为风的效果,电扇叶片有或许向相反的方向自在旋转。在这种情况下,发动选用无传感器算法的PMSM电机是一个应战,并且有或许损坏逆变器。一种解决方案是检测旋转方向和转子方位,并运用这些信息在发动电机前经过主动制动将电机减速至停止状况。相同,还或许有必要施行附加算法,如每安培最大转矩(MTPA)、转矩补偿和磁场弱化[1]等。这些类型的运用特定附加算法关于开发有用解决方案必不可少,但它们也会延伸开发时刻并使软件验证杂乱化,从而添加规划杂乱程度。
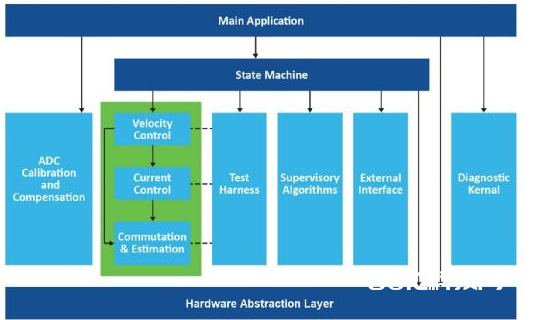
图3:FOC的运用结构
下降杂乱程度的一种解决方案是,规划人员创立一个模块化软件架构,这种架构可将运用特定算法添加到FOC算法中,一起不影响时刻要害型履行。图3给出了典型的实时电机操控运用程序的软件架构。此结构的中心是FOC函数,该函数供给了硬时序束缚和许多运用特定的附加功用。结构内的状况机将这些操控功用与主运用程序连接起来。这种架构需求在软件函数块之间有一个界说明确的接口,以使其完成模块化并简化代码维护作业。模块化结构支撑不同运用特定算法与其他体系监督、维护和功用安全程序的集成。
模块化架构的另一个优点是将外设接口层(或硬件笼统层)从电机操控软件中分离出来,这便于规划人员在运用功用和功用需求发生变化时,将其IP从一个电机操控器无缝迁移到另一个电机操控器。
完好生态体系的需求
应对这些应战需求一个为无传感器FOC量身打造的电机操控生态体系。电机操控器、硬件、软件和开发环境应协同作业,以简化完成高档电机操控算法的进程。 为完成这一方针,此生态体系应具有以下特性:
1.一种用于主动履行电机参数丈量、规划操控环和生成源代码的高档东西,可让没有范畴专业知识的规划人员能够完成FOC电机操控,并编写和调试十分耗时的杂乱时刻要害型代码
2.适用于FOC和不同运用特定附加算法的运用结构,用于缩短开发和测验时刻
3.具有确定性呼应的电机操控器以及可在单芯片中完成信号调度和体系维护的集成模仿外设,用于下降解决方案总本钱
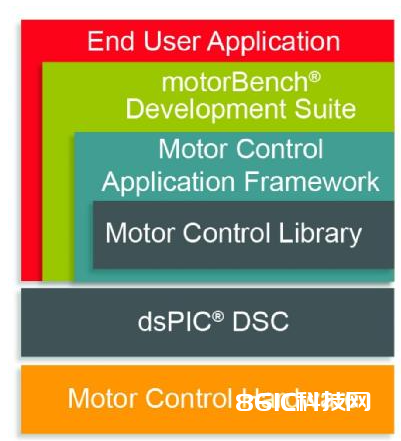
图4:Microchip电机操控生态体系架构
图4给出了一个电机操控生态体系架构的示例,其间包括运用结构和一个用于高功用dsPIC33电机操控数字信号操控器(DSC)的开发套件。此开发套件在根据GUI的FOC软件开发东西的基础上构建,能够丈量要害的电机参数并主动调整反应操控增益。此外,它还可为运用电机操控运用结构(MCAF)在开发环境中创立的项目生成所需的源代码。解决方案协议栈的中心是电机操控库,这种库能够完成运用程序的时刻要害型操控环功用,并与dsPIC33 DSC的电机操控外设交互。此GUI可与多个可用的电机操控开发板合作运用,支撑电机参数提取并为各种低压和高压电机生成FOC代码。
对高能效和产品差异化的需求推动了向无刷电机的改变。全面的电机操控生态体系可供给一种全体办法来简化根据PMSM的无传感器FOC的完成,这种办法应包括专用的电机操控器、快速原型开发板和可主动生成代码的易用FOC开发软件。
参考资料
[1] TB3220-运用视点盯梢锁相环预算器完成面向家用电器的永磁同步电机(外表贴装和内置)的无传感器磁场定向操控:http://www.microchip.com.cn/newcommunity//Uploads/202003/5e65d169337d8.pdf
[2] motorBench®开发套件:https://www.microchip.com/design-centers/motor-control-and-drive/motorbench-development-auto-tuning
[3] 电机操控规划资源:https://www.microchip.com/design-centers/motor-control-and-drive
[4] 电机操控库:https://www.microchip.com/design-centers/motor-control-and-drive/motor-control-library






