


导读:本文首要介绍的是步进电机驱动器原理,感兴趣的盆友们快来学习一下吧~~~很涨姿态的哦~~~
1.步进电机驱动器原理–简介
步进电机驱动器,其实便是一种将电脉冲转化为角位移的执行机构。首要步进驱动器会接收到一个脉冲信号,然后它按设定的方向滚动一个固定的视点,它的旋转是以固定的视点一步一步运转的。一起能够经过操控脉冲的个数来操控那个固定视点,然后到达精确定位的意图;运用脉冲频率来操控电机滚动的速度和加速度,然后到达调速和定位的意图。

2.步进电机驱动器原理–组成结构
步进电动机驱动体系的功能,不光取决于步进电动机本身的功能,也取决于步进电动机驱动器的好坏。步进电机驱动器首要结构首要有以下部分,一起能够用功率元器件直接操控电机的各相绕组。
维护电路—当绕组电流过大时发生关断信号对主回路进行关断,以维护电机驱动器和电机绕组。
传感器—对电机的方位和视点进行实时监控,传回信号的发生设备
3.步进电机驱动器原理
步进电机驱动器的原理,选用单极性直流电源供电。只要对步进电机的各相绕组按适宜的时序通电,就能使步进电机步进滚动。可是步进电动机不能直接接到直流或交流电源上作业,有必要运用专用的驱动电源。如下图所示,为四相反应式步进电机作业原理示意图。
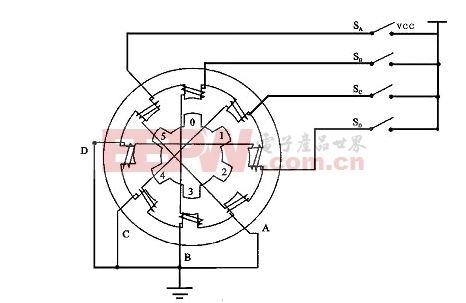
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,一起,转子的1、4号齿就和C、D相绕组磁极发生错齿,2、5号齿就和D、A相绕组磁极发生错齿。
当开关SC接通电源,SB、SA、SD断开时,因为C相绕组的磁力线和1、4号齿之间磁力线的效果,使转子滚动,1、4号齿和C相绕组的磁极对齐。而0、3号齿和A、B相绕组发生错齿,2、5号齿就和A、D相绕组磁极发生错齿。顺次类推,A、B、C、D四相绕组轮番供电,则转子会沿着A、B、C、D方向滚动。
拓宽阅览:
单片机操控步进电机驱动器作业原理
步进电机驱动器直流电源规划的原理图
步进电动机的作业原理及驱动办法






