


一、著作简介
步进电机是将电脉冲信号转变为角位移或线位移的开环操控电机,是现代数字程序操控体系中的首要履行元件,运用极为广泛。在非超载的情况下,电机的转速、中止的方位只取决于脉冲信号的频率和脉冲数,而不受负载改变的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向滚动一个固定的视点,称为“步距角”,它的旋转是以固定的视点一步一步运转的。能够经过操控脉冲个数来操控角位移量,然后到达准确定位的意图;一起能够经过操控脉冲频率来操控电机滚动的速度和加速度,然后到达调速的意图。
步进电机是一种感应电机,它的作业原理是运用电子电路,将直流电变成分时供电的,多相时序操控电流,用这种电流为步进电机供电,步进电机才干正常作业,驱动器便是为步进电机分时供电的,多相时序操控器。
尽管步进电机已被广泛地运用,但步进电机并不能像一般的直流电机,沟通电机在惯例下运用。它有必要由双环形脉冲信号、功率驱动电路等组成操控体系方可运用。

此次著作首要选用TB67S109A电机驱动器。TB67S109A是一种装备PWM斩波器的两相双极步进电机驱动器,内置时钟解码器。特色有以下几点:
1、能够操控一台双极步进电机
2、能够用PWM来操控恒流驱动
3、答应全步,半步,四分之一,1/8,1/16,1/32步运转。
4、过错检测(TSD/ISD)信号输出功用。
5、内置过错检测电路(热关断(TSD),过电流关断(ISD),以及上电复位(POR)
5、可经过外电阻与%&&&&&%自定义电机的斩波频率。

三、体系规划
补白:步进电机不能直接接到工频沟通或直流电源上作业,而有必要运用专用的步进电机驱动器,它由脉冲产生操控单元、功率驱动单元、维护单元等组成。驱动单元与步进电动机直接耦合,也可理解成步进电动机微机操控器的功率接口。
四、原理图
4.1 TB67S109A驱动电路
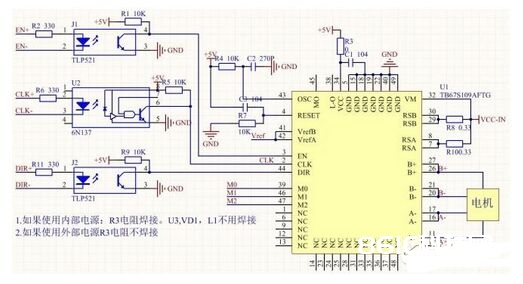
补白:步进电机驱动器,它是把操控体系宣布的脉冲信号转化为步进电机的角位移,或者说:操控体系每发一个脉冲信号,经过驱动器就使步进电机旋转一个步距角。也便是说步进电机的转速与脉冲信号的频率成正比。所以操控步进脉冲信号的频率,就能够对电机准确调速;操控步进脉冲的个数,就能够对电机准确定位。
4.2 逻辑电路
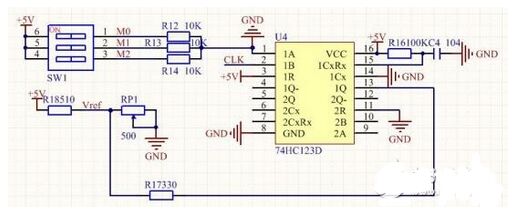
补白:如上图所示,这是一个由74HC123D构成的两层可再触发的单稳态多谐振荡器,它的功用是在没有接收到脉冲信号时分主动将驱动电流降为一半。而M0、M1、M2的作用是挑选细分。
4.3 电源电路
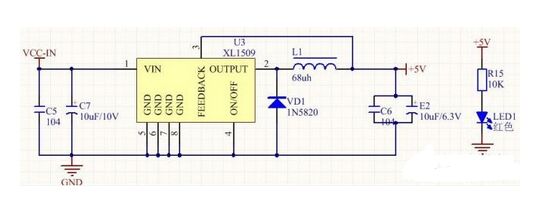
补白:因为单片机作业在5V,而步进电机的作业电压为几十V,所以需求XL1509对电源进行稳压至5V,给单片机供应电压。
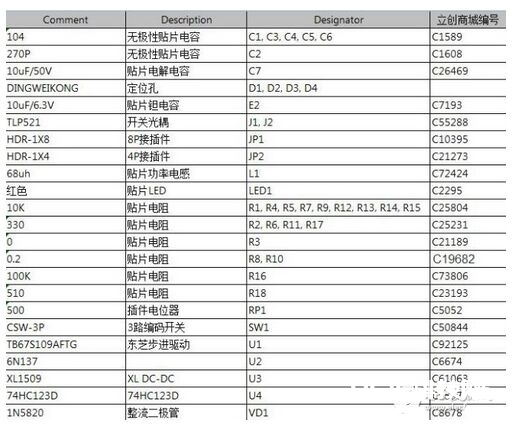
五、资料清单(BOM表)首要物料
首要的%&&&&&%物料。
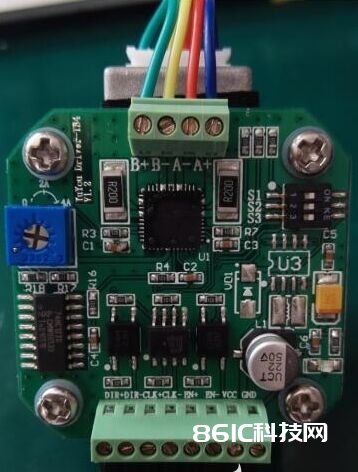
六、PCB实物图

七、总结
在此次电子制造中,发现了一些步进电机需求特别注意的事项,在这里提出来给我们参阅参阅:
1、步进电机运用于低速场合—每分钟转速不超越1000转,(0.9度时6666PPS),最好在1000-3000PPS(0.9度)间运用,可经过减速设备使其在此间作业,此刻电机作业效率高,噪音低;
2、步进电机最好不运用整步状况,整步状况时振荡大;
3、电机在较高速或大惯量负载时,一般不在作业速度起动,而选用逐渐升频提速,一是电机不失步,二是能够削减噪音一起能够进步中止的定位精度;
4、应遵从先选电机后选驱动的准则。






