


现在市场上最受欢迎的液位传感器与前期的接连丈量液位传感器的差异,在于运用了飞翔时刻(TOF)丈量技能,然后将丈量成果转换为惯例输出办法。这些新的液位丈量传感器一般装置在容器的顶部,丈量传感器监测点与液面之间的间隔;从传感器检测点宣布一个脉冲波,脉冲波能够穿透容器顶部的气体或一些实体,抵达液面时发生反射,反射信号被接纳器接纳。电子守时电路记载脉冲波的发射时刻和接纳时刻,即得出脉冲波飞翔时刻,然后再乘以脉冲波的速度就能够得出丈量间隔。这些新式液位丈量技能的首要差异在于脉冲波的方法不同,例如:超声波、微波(雷达)和光波。
在油性、酸性、高温、高压等极点恶劣的测验环境下,为了完结液位丈量需求用到各种新型资料如合金等。新资料的创造有助于拓宽传感器的运用,如聚四氟乙烯护套资料能够完结耐腐蚀运用、电抛光316不锈钢能够满意清洁度要求。
磁致弹性液位变送器
运用磁浮子丈量液位的办法,其优势在前面现已描绘过。磁致弹性技能现在现已被证明能够十分准确的读取浮子的方位。磁致弹性液位计的传感器作业时,(如图1所示)传感器的电路部分将在波导丝上鼓励出脉冲电流,该电流沿波导丝传达时会在波导丝的周围发生脉冲电流磁场。
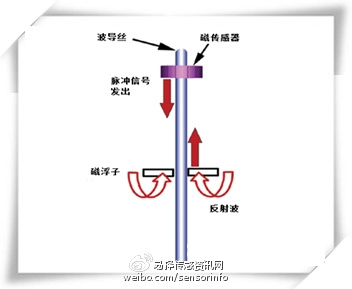
在磁致弹性液位计的传感器测杆外配有一浮子,此浮子能够沿测杆随液位的改动而上下移动。在浮子内部有一组永久磁环。当脉冲电流磁场与浮子发生的磁环磁场相遇时,浮子周围的磁场发生改动然后使得由磁致弹性资料做成的波导丝在浮子地点的方位发生一个改变波脉冲,这个脉冲以固定的速度沿波导丝传回并由检出组织检出。经过丈量脉冲电流与改变波的时刻差能够准确地确认浮子地点的方位,即液面的方位。该技能的首要长处是:脉冲波的速度是已知的;如温度、压力等进程变量是稳定的;脉冲信号不会受环境物质影响;脉冲波的发散性小;不会遭到过错信号搅扰。另一个优点是,仅有的运动部件是磁浮子,随流面上下移动,作业牢靠,寿命长。
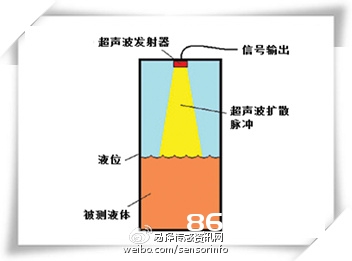
超声波液位变送器
超声波液位传感器(如图2所示),经过核算超声波宣布时刻到接纳回来信号的时刻差(TOF),乘以超声波的速度得出传感器与液体外表间的间隔。一般液位变送器中运用的超声波频率为上千赫兹,超声波的传达速度到达6米/毫秒。声波的传达速度与传达介质的资料组成、温度等相关(15℃的空气中,声响的传达速度为340米/秒)。超声波液位传感器受温度的影响发生的误差,能够经过温度补偿的办法来批改,可是这种温度补偿技能还只是限制在空气或氮气介质下,而且气体压力为大气压力。
激光液位变送器
激光器的作业原理和超声波液位传感器十分类似,一般被用于散装颗粒物、料浆和不透明的液体(如污水、牛奶、苯乙烯等)。超声波液位传感器运用的是超声波载体丈量液面,而激光液位传感器运用的是光载体丈量液面。(见图3所示)。
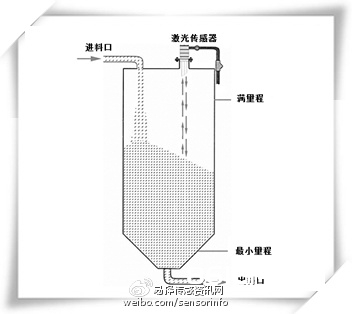
在容器顶部装置一个激光发射器,发射一束激光脉冲后到达液体外表并反射回来,由探测器收集反射回来的激光脉冲信号,运用守时电路丈量激光脉冲的飞翔时刻然后换算出间隔。因为激光的聚集性(光束发散角小于0.2°)且不会呈现虚伪反射波,能够在烟雾和泡沫的环境下完结准确丈量。激光液位丈量体系在障碍物很多的容器丈量环境中是一个抱负的挑选,而且其丈量规模能够到达1500英尺,在高温文高压的环境下相同适用。
激光液位丈量体系乃至被用在核反应堆容器中,激光器经过丈量玻璃窗完结无触摸式丈量,当然玻璃窗的分散性和光衰减必须在设计时进行考虑。
雷达丈量体系装置在容器顶部,向下发射微波脉冲信号;微波脉冲信号到达液体外表后反射回去,一起用电路核算微波信号的往复时刻,然后核算出传感器离页面的间隔。可是假如液体的介电常数太小或许会引起雷达液位传感器无法正常检测液位;假如液体的介电常数太小,雷达波能够穿过液体,而反射的雷达波的能量太小不能被雷达接纳器检测到。
和超声波液位丈量相同,雷达波也会呈现发散而影响丈量准确性;一起容器内部的结构和一些障碍物引起的反射雷达波也会形成丈量过错。为了处理这些问题将含糊算法引进雷法发射器,可是因为容器环境的不同这些问题或许仍然存在。

导波雷达(GWR)液位丈量体系(如图4所示)能够处理以上问题。导波雷达液位计选用触摸式的丈量办法,运用导波杆探头(钢性探针或柔性电缆)来发射与接纳信号,将导波杆探头装置在丈量罐的顶部,其尾端直达罐底,发射信号及反射信号都经过导波杆传达,信号不会辐射到外部空间中,所以反射信号的质量更好。导波雷达液位丈量体系所丈量的液体的介电常数能够低至1.4,在狭小的空间仍然能够完结丈量,并能适用于高温文高压的工况。






