


不间断电源UPS(Uninterrupted PowerSupply)呈现于上世纪80年代,它处理了传统市电直接供电形式下电能质量差、牢靠性低一级问题,并开端为重要负载供给电能保证。跟着用电负载对供电容量、牢靠性方面越来越高的要求,传统UPS露出出了比如扩容难、修理性差缺乏。为处理这些问题并进一步满意用户对电能的质量和牢靠性要求,依据高频链的模块化UPS技能正被广泛重视和研讨。模块化UPS选用N+X冗余供电,在扩展性、牢靠性和修理性方面较传统UPS有了长足的前进,成为未来UPS开展的一个重要方向。完结模块化的关键是逆变模块之间的并联均流操控,要求各个模块同步输出,即同幅、同频、同相,否则在逆变器间将会发生很大的环流,对并联体系构成不良影响乃至溃散。
近年来跟着数字信号处理器的广泛应用,极大地推进了UPS逆变模块并联均流操控技能的开展。完结逆变器并联均流操控的办法许多,就模块间有无操控连线而言,逆变器并联操控技能可分为有互联线逆变器并联操控和无互联线逆变器并联操控两大类。有互联线逆变器并联操控的首要思维是从传统直流电源的并联技能而来,是一种自动负载均分技能,运用较多的首要有会集操控、主从操控、涣散逻辑操控。其间会集操控和主从操控在恣意时间都依托于一个操控单元;涣散逻辑操控是独立操控办法,可完结模块自我操控。虽然运用这些操控技能现已相对老练,并且在输出电压调理和模块均流方面都取得了不错的作用,可是模块间不可或缺的信号连线却一直限制着有互联线逆变器操控技能的开展,并极大地降低了体系的牢靠性和扩展性。无互联线逆变器操控的首要思维来源于下垂特性理论。针对逆变器输出的有功功率及无功功率,通过调理逆变器输出电压的幅值及频率,完结逆变模块间均流操控,比较有互联线操控,因为无互联线操控中逆变模块之间没有互联线,每个模块只需检测本模块输出信息,通过解耦核算就可直接得到操控信号完结对本身的操控,所以依据下垂法的无互联线操控具有很高的牢靠性和灵活性。
1.环流剖析
抱负UPS中每个逆变模块的输出电流应持平以完结输出功率的均分,可是实践制造中每个逆变器模块的参数无法完全共同,加之线路阻抗的不同,使得各逆变模块输出电压的幅值和相位无法在恣意时间准确持平,导致各逆变模块间输出功率均分和电流无法准确均分,这将引起逆变器模块间的环流,对设备构成极大损伤,尤其是在体系空载或许轻载的状况之下乃至损坏体系,因为当模块间呈现环流时,有的模块将吸收有功功率,然后运转在整流形式,这将导致直流侧电压上升,并对直流侧电容构成损坏。
因而对逆变器间环流进行剖析十分重要,为此咱们树立如图1所示的两台逆变器并联体系等效模型:
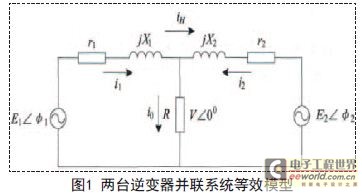
设E1∠φ1、E2∠φ2分别为逆变器1和逆变器2的出电压;r1+jX1和r2+jX2分别为逆变器1和2的输出阻抗和导线阻抗之和,负载为R,且负载电压为V<00,i1和i2分别为逆变器1和逆变器2的输出电流,i0为负载电流。
依据欧姆定律能够得到:
将式(1)、(2)带入式(3)中,并假定在并联体系中输出阻抗和线路阻抗中的阻性成份r1=r2≈0;体系并联运转时,逆变器间的输出电压相位不同很小,使得sinφi=φi,cosφi=1;逆变器模块组成部分参数差异不大,近似以为X1=X2=X.
得到通过简化后的有功功率和无功功率为:

由此可知,在实践体系中因为每台逆变器模块的输出阻抗不同,导致逆变器模块间输出电压发生幅值差和相位差,使得各逆变器输出有功无功不均,构成环流。可是能够通过对输出电压的幅值和相位进行调理,完结对有功无功的操控。为了防止环流的发生,人们提出了许多操控战略,但就并联UPS模块间有无互联线而言,可分为两大类,即有互联线逆变器并联操控和无互联线逆变器并联操控。下面将对这两类操控办法顺次介绍。
2.有互联线逆变器并联操控
2.1 会集操控
会集操控思维为树立一个操控中心,对各模块输出电压电流信息共同搜集并处理,且一切逆变模块的操控指令由操控模块共同下达。
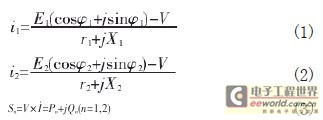
其原理框图如图2所示,假定各单元中电流差是由电压幅值不共同构成的,直接把电流差作为电压指令的补偿量以消除电流的不平衡。
如图2所示,并联操控单元首要检测沟通母线电压的频率和相位,以此为基准,得到输出电压参阅频率f*,通过每个逆变模块中的锁相环PLL(PhaseLockLoop)进行锁相,使得每个逆变器输出电压频率共同;然后检测负载电流iL,iL除以并联模块数N后得到参阅电流iref,用本模块输出电流i减去参阅电流iref后得到的Δi作为输出电压补偿量,核算得到输出电压参阅值V*;最终用V*与f*组成参阅电压Vref,完结输出功率和电流的均分。
会集操控是最早呈现的操控办法,其原理相对单且易于完结,可是因为体系共用一个会集操控中心,一方面使得并联体系难以完结真实的模块化,另一方面假如该操控单元呈现毛病,则整个体系就会瘫痪,无法运用到大型分布式体系之中。2.2 主从操控
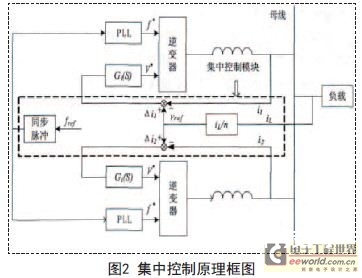
人们为了处理会集操控下因为操控中心仅有构成的体系牢靠性较差问题,开端将操控单元做到每台逆变电源中,运转时挑选一台主控逆变电源担任完结并联操控功用,其他逆变电源做从机,这便是主从操控基本思维。传统主从操控首要分为三类:单主机形式、轮番主机形式和最大电流主机形式。并联体系作业时首要起动的逆变电源为主机,行使操控功用,其他逆变电源则为从机,按照主机给出的同步基准信号作业。这种办法克服了会集操控下操控单元呈现毛病逆变电源就不能运转的缺点,只需仍有逆变电源正常作业,就可切换主机并持续运转。图3给出了主从操控原理框图。
模块将向网络状况信号线宣布信号,标志此刻体系内已有主机,一起闭合开关K,将本模块核算得到的操控信号通过公共同步基准信号线传递给其他从模块;关于其他从模块而言,启动时检测到网络状况线BL=1,阐明此刻体系有主机,则开端接纳主模块传递的操控信号对本模块进行操控。
这样,主模块以电压源逆变器运转,而从模块以电流源逆变器运转。主从操控较会集操控的牢靠性有所进步,当主模块失效时,体系中恣意一个从模块将会替代主模块的人物为整个体系供给输出电流参阅信号,以防止整个体系的失效。可是从主模块毛病,到从模块切换为主模块过程中体系或许因失掉同步而呈现大规模失效,一起各模块的操控逻辑判别电路杂乱,故牢靠性不高。
2.3 涣散逻辑操控
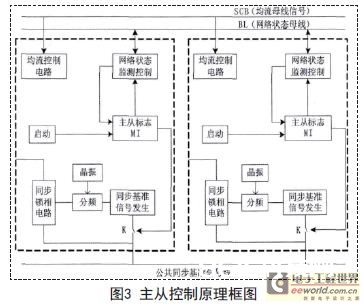
从会集操控开展到主从操控,都未能处理体系在恣意时间需求一个操控单元而构成的稳定性和牢靠性差的问题。人们规划出一种不依赖于会集操控单元或某个主模块的操控战略,完结独立检测、操控本模块作业状况并合理分配模块间的输出功率、按捺环流的办法,称为“独立并联操控技能”.如图4所示为涣散逻辑操控原理框图。
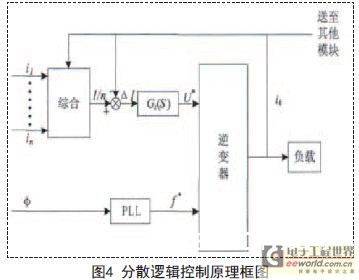
如图4所示,单个逆变模块通过信号总线接纳其他各模块输出信息,核算后得到输出电流平均值I/n作为本模块的参阅输出电流,模块实践输出电流与参阅输出电流之差ΔI通过电流环后得到输出电压参阅幅值U*,输出电压参阅频率f*则通过锁相环对沟通母线电压锁相后得到,最终组成输出电压参阅Uref,完结模块间的均流操控。
涣散逻辑操控归纳体系中各逆变器输出信号,核算并得出操控信号,这种办法可完结真实的N+1并联运转,当一个模块毛病退出时,并不影响其他模块的并联运转。相关于会集操控和主从操控,涣散逻辑操控去掉了会集操控单元,更简单完结扩容和冗余,牢靠性也得到进步,可是作为有互联线操控战略的一种,各逆变模块之间仍存在操控互联线,使得整个体系会变得杂乱,牢靠性低。
3.无互联线逆变器并联操控
综上所述,能够看出跟着有互联线操控战略的开展,逆变器并联体系的牢靠性和冗余性有了很大进步,但正是模块间互联线的存在,体系不只牢靠性和灵活性依然遭到很大限制,且搅扰严峻,无法习惯现代电源从传统会集式供电到分布式供电的改变,因而人们开端探究一种撤销模块间互联线的操控办法,即无互连线并联操控。
3.1 无互联线并联操控基本思路
在有的文献傍边,无互联线操控技能又被称作独立操控和下垂操控,其中心思维来源于大型沟通发电机实践作业中输出电压频率跟着输出功率添加而下降这一现象。无互联线操控下模块检测本身输出电压和电流,通过核算得到本模块操控信号并进行操控,完结均流。其理论依据为:如式(7)、(8)推导,通过运用逆变器输出有功与输出电压频率、输出无功与输出电压幅值之间存在下垂联系,通过操控输出电压的幅值与频率,调理模块输出有功无功。
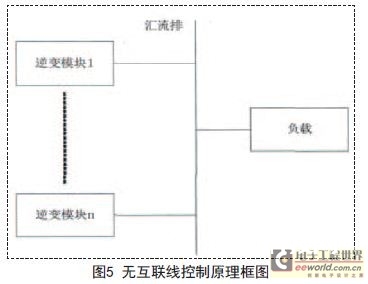
如图5所示为无互联线操控原理框图,运用无互联线操控每个模块仅收集本模块输出量信息,通过必定算法的核算后






