


一、导言
图1所示的模仿电源解决计划是一种众所周知和经过实践查验的技能,功率电子工程师在时域中了解起来毫不费力。模仿PWM操控器包含一个差错放大器,用一些电阻和电容构成补偿网络。经过对电阻和电容值进行微调可完结最佳功用。模仿PWM操控器供给快速和精确操控,人们开发了许多先进的模仿操控计划来完结最佳功用,特别是在瞬态要求十分严厉的微处理器中心电源运用中,其针对中心及外设电源运用的简单性、易用性和低本钱是无可代替的。
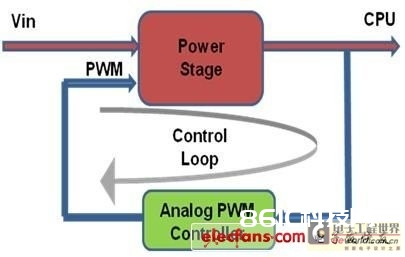
图1,模仿电源框图。
最近,数字电源在计算机运用范畴遭到重视。图2侦测所示的数字电源解决计划经过数字化所侦测的电压和电流信息以及以数字方法(频域)重建补偿器和PWM比较器来仿真模仿操控环路模块。要想完结与模仿环路类似的功用,常常需求极高速(》100MHz)的数字算法处理器,这会导致较高的待机功耗,并或许需求非易失存储器(NVM)来存储具体规划装备信息,如反应补偿参数。它还需求工程师在模仿和数字域中了解规划。由于其杂乱性的原因,一般电源规划人员无法彻底了解数字PWM操控器,这迫使数字PWM厂商向用户供给一切支撑和完结规划的大部分内容。因此,规划的稳健性和牢靠性严峻依赖于厂商支撑。数字电源有模仿电源所不具有的一些长处,如轻松更新操控回路补偿参数而不修正硬件电路。另一方面,侦测合适计算机运用职业的解决计划依然需求对热补偿和电流侦测网络在硬件电路层面进行微调,因此它们底子不是全数字式计划,而是一种混合式计划。
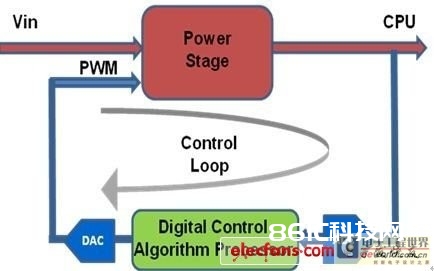
图2,数字电源框图。
关于需求用户接口和电源办理的体系,人们常常会引进串行总线,如PMBus。图3所示的混合数字电源解决计划在模仿操控环路和电源办理模块之间需求一个ADC(模/数转化器)和一个DAC(数/模转化器),用于接口和通讯。由于数字电源计划中一切选用数字方法的部分都包含在操控环路中,所以数字环路和电源办理模块之间不需求专用的ADC或DAC,如图4所示。可是,数字电源解决计划需求一个ADC来数字化侦测到的电压和电流模仿信号,以便进行数字操控处理,还需求一个DAC来将数字信息转化回模仿方法,用于操控功率级。该ADC和DAC都在数字操控环路内部;这有或许影响环路呼应,除非运用十分高速和高位数(bit-count)的ADC/DAC,这会明显进步偏置功率。PMBus电源办理模块的作业频率一般为100kHz或400kHz,而关于十分快速的ADC和DAC转化,数字操控算法处理器的作业频率有必要大于100MHz。因此,混合解决计划一般具有比数字解决计划低得多的偏置功率和更快速的环路呼应。
本文将具体评论全数字和混合数字电源计划,包含完结、体系功用、本钱、制作和库存操控以及环境影响。
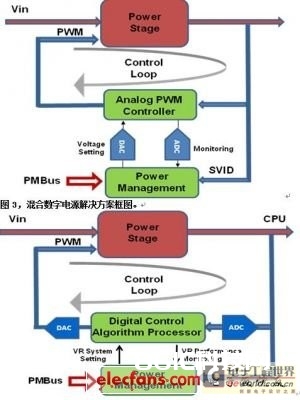
图4,全数字电源解决计划框图。
二、混合数字电源办理与全数字电源办理
(1)偏置功率需求
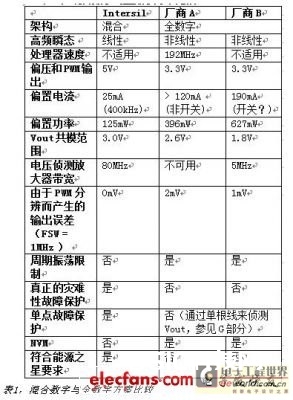
要想完结高精细的DAC精度(比方0.5%)和高PWM分辨率(比方100ps),数字操控器需求极高速(》100MHz)处理器[2]来在数字域中仿真模仿操控环路。它一般运用低偏置电压,如1.8V、2.5V或3.3V,这有助于最小化偏置功率。可是,为计算机运用开发的两个多相数字PWM操控器会耗费超越100mA偏置电流,耗费的偏置功率是Intersil的混合数字多相PWM的的3~5倍。表1具体说明晰这一点,以及对Intersil和别的两家数字PWM厂商针对英特尔VR12代多相操控器的其他相关比较信息。由于耗费的偏置功率较高,规划中运用该种数字操控器的稳压器具有轻负载时功率低的缺陷,且无法满意动力之星要求,一起一般不用于笔记本电脑运用。由于未来产品要求更低的功耗和寻求更绿色的环保,所以全数字操控好像不是正确的路途。
此外,更低的偏置电压一般会约束共模规模,并或许在输出电压变高时使DCR电流侦测放大器饱满。它会导致各相间电流失衡,从而导致功率级过载。并且,数字操控器具有更低的PWM输出信号电平,并有或许引进相位转化时的噪声,或许会在空间严峻型规划中导致体系毛病。
(2)可编程性和用户接口
市面上的多相数字PWM解决计划的确供给了对环路呼应进行编程而不需求对硬件电路进行修正的长处,但依然需求经过细小的电路修正对许多其他功用进行微调。全数字计划十分倾向于算法驱动方法,且因厂商的不同而异。一般,客户不会成为解决计划方面的专家,或许或许只要1~2名工程师彻底了解该操控器。因此,数字解决计划的稳健性和牢靠性严峻依赖于厂商的支撑。
混合数字计划供给了模仿操控环路来完结国际一流的瞬态功用,以及PMBus接口来完结可编程性和用户接口。操控环路可编程性可按需求来完结而不会发生全数字解决计划的高偏置电流缺陷。通晓模仿解决计划的电源工程师一般十分简单了解这一点,因此犯错时机更小,更有或许在第一次就成功。 (3)环路和瞬态呼应
由于DAC和ADC转化推迟,数字操控器的环路带宽一般限于不超越100kHz规模,而模仿和混合数字操控器能够超越100kHz,如图5所示。图6显现慢速环路的呼应速度将会更慢并发生更高的过冲和下冲。模仿环路对负载和输入瞬态的呼应快许多,最小化了输入和输出搅扰,导致更小的输入和输出滤波器尺度。虽然非线性技能一般用于加速数字操控器的呼应速度,但它会在宽负载规模上构成不一致的呼应,如图7所示,其原因在于离散阈值的触发。此外,非线性操控会导致不均匀的脉冲散布和低质的电流均衡才能,如图9所示。与用于数字操控器的非线性操控计划比较,Intersil的混合数字操控器ISL6367/67H [9,10]运用的线性操控可发生滑润的负载阶跃呼应和均匀散布的相位脉冲,如图8和图10别离所示。
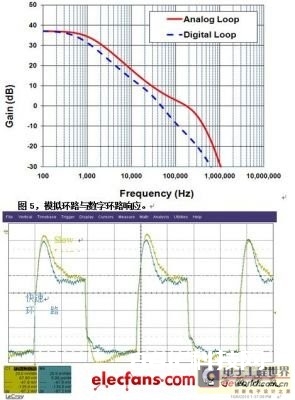
图6,慢速环路与快速环路瞬态呼应。
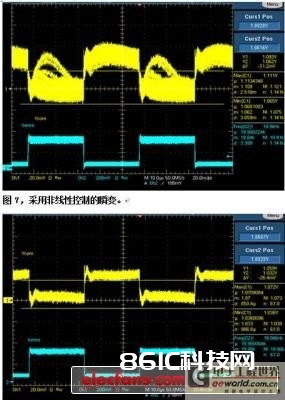
图8,选用Intersil的线性操控的瞬变。

图10,线性操控1MHz瞬变的相位转化次序。
(4)DC功用
与模仿解决计划的无限分辨率比较,全数字解决计划常常具有由于ADC分辨率和PWM分辨率而发生的量子化差错。别的,电源状况的纹波改变也会影响稳压精度,如图11所示。混合计划坚持了模仿计划的高精度。
数字操控器常常宣称在环境条件、老化和元件改变下具有更小的Vout漂移。对数字操控环路补偿部分(没有外置R和C)是真的,但包含输出滤波器(电感和%&&&&&%)在内的功率系的特征依然会跟着环境温度、老化和元件改变而改变。校准能够改善精度,特别是在电流侦测中,但它会添加本钱(拜见E部分)。除非在每次上电时进行校准并对操控环路进行重新装备,不然数字解决计划将依然会有易受环境改变影响的缺陷。此外,低DCR(0.15mOhm或更小)电感将会持续增多这样的影响,在全数字操控器的情况下这将要求更高分辨率的ADC,亦即更高的偏置电流。
数字解决计划的DC精度受PWM分辨率的影响[2];例如,200ps PWM分辨率会对1MHz 开关频率下的12V输入发生2.4mV差错。
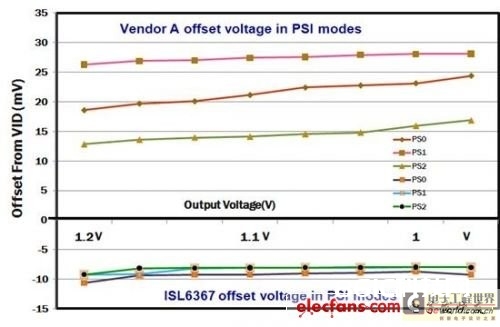
图11,来自VID加载的输出失调(10A)
(5)校准
全数字解决计划常常宣传其校准功用,由于它们常常需求进行校准来完结与混合计划相同的精度。校准是杂乱和非免费的,常常需求外置MOSFET和精细侦测电阻,好像厂商B的解决计划相同。这些附加元件一般价值超越0.20美元,一起还会添加用电量。
(6)相倍增器兼容性和上电次序
相数倍增器常常用于高相数和超频运用[3]。通道之间的电流均衡对规划稳健和牢靠的体系极其重要。市面上完结通道电流均衡的相数倍增器仅为5V PWM输入逻辑[11,12],且不兼容3.3V数字操控器。数字操控器一向运用没有电流均衡功用的相数倍增器,这会发生长时间牢靠性较差和或许构成体系发热事情。Intersil相数倍增器%&&&&&%的杰出相间电流均衡请拜见图12。
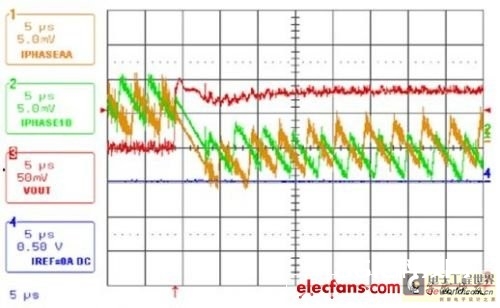
图12,Intersil相倍增器在负载瞬变期间的通道电流均衡
在服务器范畴,可发生最佳功率的典型驱动器电压为5V,这是不同于数字操控器的偏置电压的,它使上电次序和维护杂乱化;呈现了三种或许情形:
1) 驱动器首先上电。 驱动器检测到PWM低并接通低端MOSFET来给输出放电;体系将不答应预充电发动。
2) 数字操控器首先上电。驱动器检测到PWM高或许在驱动器电压变慢时检测到一个全占空比PWM信号;体系将失掉软发动并导致高端MOSFET的过应力。
3) 驱动器和操控器由同一个启用信号操控。在断电期间由于高端MOSFET短路,CPU将不会遭到维护,由于驱动器已被禁用。
(7)体系维护
数字操控器需求数字化电压和电流信息,然后再将其转化回模仿信息,这一切全都在操控环路内部进行。这一般导致比模仿环路更慢的呼应,如图5所示。别的,由于操控环路中的ADC和DAC,数字操控器将对需求当即予以呼应的毛病(如输出短路、高端MOSFET短路或输出过电压)发生较差的维护。如表1所示,市面上的数字解决计划只对输出供给一个侦测点。当反应途径由于元件功用下降、尘埃或湿润而构成分割器时,输出电压将上升而不触发过压维护(OVP),由于没有第二个点来监测






