


电容式加速度传感器 首要包含检测电路和灵敏元件两部分。当传感器遭到外界加速度效果时,会使灵敏元件在某一方向上产生偏移,然后导致电容值产生改动,再经过外围处理电路到达丈量加速度值的意图。
首要包含检测电路和灵敏元件两部分。当传感器遭到外界加速度效果时,会使灵敏元件在某一方向上产生偏移,然后导致电容值产生改动,再经过外围处理电路到达丈量加速度值的意图。
微电容式加速度传感器常用的电容式结构有两种:一种是梳齿型电容式结构;另一种是栅型电容式结构。这两种类型结构的电容检测方法有所不同,所以其功能在持平条件下也有差异。梳齿型传感器是经过改动电容的极板间隔来检测加速度,而栅型结构是经过改动电容的极板面积来检测加速度。在梳齿型结构中,压膜阻尼占主导要素,其由可动极板相对固定极板的笔直方向运动而产生;而在栅型结构中,滑膜阻尼占主导要素,其是由可动极板相对固定极板的切向运动而产生的。依据传感器的理论模型剖析,阻尼对器材的功能影响不容忽视,阻尼越大,机械噪声越小,质量要素越高,动态特性也就越好。滑膜阻尼一般小于压膜阻尼,所以,在相同情况下,栅型结构器材功能更好。
本文依据MEMS工艺规划了一款具有8个支撑梁的新式双轴加速度传感器,该传感器结构具有较小地气体阻尼。别的,文中还经过Ansys软件对器材的功能进行了仿真,其成果验证了结构规划的可行性。
1 结构规划与理论剖析
1.1 结构规划
该加速度传感器由4个一字梁、4个回形支撑梁、X轴和Y轴向的灵敏质量块、铝电极和硼酸玻璃衬底组成。X轴和Y轴向的灵敏质量块经由一字梁和回行支撑梁固定在压焊块上。全体质量块划分为4个区域,在每个区域上制造了一组栅型电极,这4组栅型电极均是检测电容的可动极板,其间X轴和Y轴方向上各有两组。栅型电容的输入引线、输出引线、相互连接引线和固定铝电极均制造在硼酸玻璃衬底上。规划的加速度传感器全体结构如图1所示。
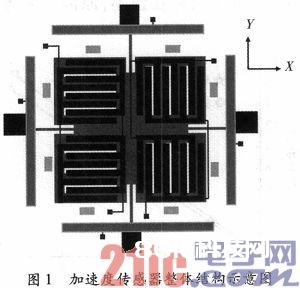
图中,淡色部分为铝电极和引线;深灰色部分为质量振子和弹性梁;黑色部分为锚点;淡色部分为维护限位设备。离灵敏质量块的间隔为15μm,用来防止加速度过大时,因可动栅型条偏移宽度超越与其组成的差分电容的固定铝电极宽度而引起的丈量不精确及结构开裂。
1.2 检测原理及穿插搅扰剖析
图2所示为X轴向电容检测原理示意图,图2(a)为栅型可动极板随加速度改动的结构示意图,图2(b)所示为其等效电路。当加速度在X轴水平方向上未遭到外界加速度效果时,可动栅型条坚持在初始的平衡位置,当在X轴方向上遭到外界加速度效果时,灵敏质量块将沿着水平面左右移动,如图2(a)所示,则栅型条与铝电极间的掩盖宽度产生了改动,随之电极之间的电容值也有所改动。设可动极板向右运动,则电容C1削减,此刻,C2将增大相同量,然后完成了X轴向的差分检测电容。
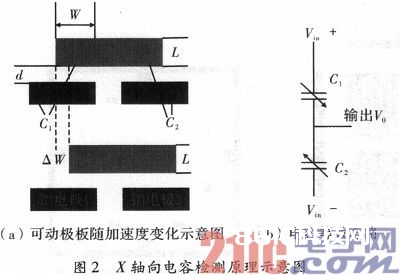
设栅型条极板的长度为L,与铝电极掩盖宽度为W,可动栅型条和铝电极之间的间隔为d,介电常数为ε;当灵敏质量块遭到外界加速度效果时,设栅型条偏移的间隔为△W,则改动后的电容值为
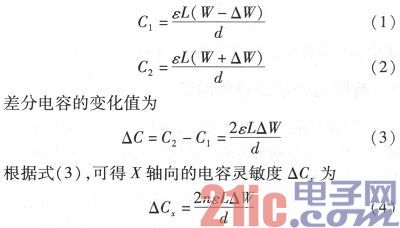
式(4)中,n为X轴向的栅型条个数,n=44。因为Y轴向和X向的检测单元与电容等效电路彻底相同。因而,可知Y轴与X轴向的电容灵敏度持平,即△Cy=△Cx。
当加速度传感器遭到平行于Y轴方向上的加速度效果时,从传感器的结构图中可看出,Y轴向的检测电容产生了改动因而有信号输出,但X轴向的可动栅型条和铝电极之间的电容值并未产生改动,故X轴向的检测单元没有电信号输出。当加速度传感器遭到平行于X轴方向上的加速度效果时,同上剖析,只要轴向的检测单元有电信号输出。故规划的传感器结构处理了X、Y轴向间的穿插搅扰问题,其穿插耦合度近似为0。
2 信号检测电路测验原理
图3为该加速度传感器的检测电路。该电路是使用电荷法来丈量电容差值,当有加速度时,差分电容的一起输出端有电荷输出,其输出电荷值为(C1-C2)Vsin,因电容Cp,所以电流不能流入到放大器的输入端,为了差分电荷全流入到反应电容Cf中,放大器将调整输出电压直到差分输入电压为零,成果寄生电容的两头电压也可视作为零,然后有用消除寄生电容的搅扰。电路中,电阻的效果是给电路供给直流通道,坚持电路正常作业,Vsin和-Vsin为两路载波正弦信号,别离接到电容C1和C2上。

假定

依据放大器的虚短和虚断原理,可得到输出端电压Vo为
式中,Wo为载波信号的频率,Vin为载波信号的幅值。
3 有限元剖析及模仿验证
进行的有限元剖析首要包含静力剖析和模态剖析。静力剖析首要是确认传感器结构的灵敏度和抗振强度;模态剖析首要用于确认传感器的谐振频率。选用的灵敏资料为一般单晶硅,硅的密度值为2.33×103 kg/m3,弹性模量为1.3×105MPa,泊松比为0.278。栅型条的长度为1 575μm,与铝电极之间的间隔为5μm,栅型条的个数为44。图4为所建Ansys仿真模型。
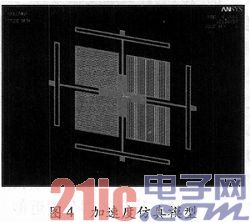
表1为X轴和Y轴在不同加速度值效果下微位移的仿真成果。从表1中的数据可看出,在加速度值为1 g时,X轴与Y轴的微位移量持平。而在加速度值较大时,两轴向微位移量相差较小,基本可疏忽,一起也验证了X轴和Y轴有相同的灵敏度。
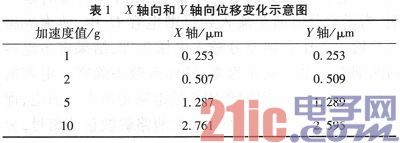
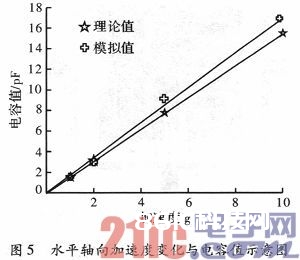
依据表1中的数据和式(4)可计算出X和Y轴向的理论灵敏度值为1.533 pF/g。图5给出了X轴向的电容随加速度值改动联系图。其间,理论灵敏度和仿真得到的灵敏度之间存在差错,原因是未考虑边际电容。
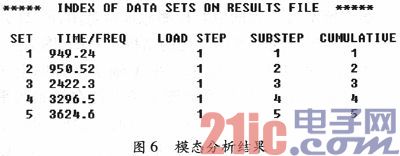
对该传感器结构进行前5阶模态剖析,数据成果如图6所示。一阶频率和二阶频率相差较小,此刻传感器结构的振型别离是环绕X轴和Y轴水平运动。后三阶振型则不是单纯的X、Y水平运动,所以得出水平X、Y轴的谐振频率为949 Hz。
4 传感器制造工艺
在该传感器的工艺制造过程中,所需的掩膜板有硅结构掩膜、铝电极结构掩膜和键合区结构掩膜3层,如图7所示。
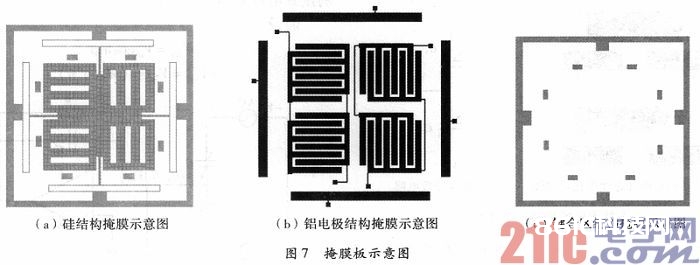
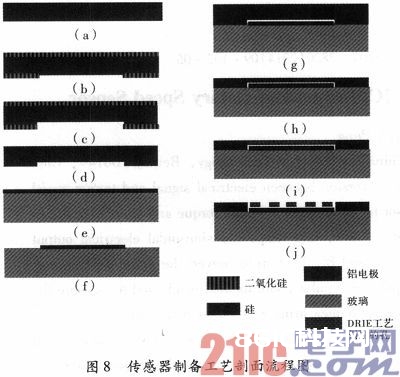
图8所示为该栅型加速度传感器的制备工艺流程图。工艺过程如下:图8(a)备片;预备一块双面抛光的硅片,厚度为5μm;图8(b)将硅片氧化,将键合区掩膜板放在硅片上光刻、腐蚀,为后续刻蚀悬空区做预备;图8(c)使用干法刻蚀制造悬空区;图8(d)彻底腐蚀硅片上剩下的SiO2;图8(e)经过溅射工艺在硼酸玻璃上制造铝薄膜层;图8(f)使用铝电极掩膜板进行掩膜光刻、腐蚀,制造规则的铝电极和引线;图8(g)使用键合工艺将制备好的硼酸玻璃衬底和硅片键合;图8(h)使用磨薄工艺将硅片减薄;图8(i)最终使用硅结构掩膜板并结合DRIE刻蚀工艺,开释质量块结构;图8(j)为质量块开释后的加速度传感器结构。
5 阻尼特性剖析
结合库埃特流模型和纳维-斯托克斯方程可得出,滑膜阻尼的阻尼系数为
式(8)中A、μ别离表明可动极板的面积与气体动态黏滞系数;标态下空气黏滞系数为1.82×105Pa·s,关于该加速度计而言;计算出的阻尼系数为8.6×102,灵敏质量块的质量为1.23×10-7kg;支撑梁刚度为2.4×1012N·m-1;得出的阻尼比为0.83。依据传感器的理论模型动态特性剖析,最优阻尼比为0.7,据此可经过该结构的尺度进行优化。
6 结束语
使用微机械加工工艺,给出了一款双轴电容式加速度传感器,其结构关于水平对称,耦合度近似为零,制备工艺简略,且遭到气体阻尼较小,故具有杰出地动态特性。别的,还规划了维护限位设备。该加速度传感器的X、Y轴的静态灵敏度为0.253μm/g;%&&&&&%灵敏度为1.533pF /g;X、Y轴向的谐振频率为949 Hz。仿真成果验证了该规划的可行性,并满意了所需规划的要求。






