


摘要:规划一种麦克纳姆轮全向行走运送渠道的体感交互操控体系。该体系运用kinect体感器提出骨骼运动信息辨认和依据深度手势辨认的两种操控办法,运用于不同场景。依据骨骼运动信息辨认操控办法通过kinect获取人体深度图画数据,然后运用骨骼追寻技能提取人体运用关节点,并树立空间坐标系,最终通过向量核算法来核算出人体关节滚动视点完结动态的动作辨认然后转换为操控指令完结渠道操控。依据深度手势辨认操控办法运用kinect获取的深度信息完结手部从布景中切割,然后运用模板匹配的办法辨认手势转换为操控指令完结渠道操控。试验标明,通过该操控体系能对全方位运送渠道进行有用灵敏的操控。
跟着跟着科技的前进,人们一向都在致力于对方便高效运送组织的研讨。全方位运动组织以其平面内彻底运动自在度,完结了狭小空间内的高度灵敏性,在军事、工业、社会生活等多方面具有广泛的运用远景。用人的身形和手势进行人机交互是一种新颖天然的交互办法,人们通过简略的肢体言语便能进行快速的人机交互,具有易完结、操控灵敏等特色。kinect是微软公司研发的一款体感辨认设备,通过它能够完结体感辨认,进行人机交互。
由此本文规划了一种运用麦克纳姆轮的体感操控全方位运送渠道模型。并针对此模型操控体系提出了依据kinect体感器的骨骼运动信息辨认和依据深度手势辨认两种体感操控形式,运用于该运送渠道的两种场景:当该渠道整合到移动机器人等长途设备时,操作者操控环境广大,可运用人体多种姿态进行精密操控;当改运送渠道整合到轮椅、叉车等近程操控设备时,操作者坐落狭隘的设备上,可运用近间隔手势动作进行简略快速高效的操控。经试验成果标明,该操控体系两种操控形式均能对该全方位运送渠道进行杰出的操控。
1 全方位运送渠道模型构建及运动学剖析
1.1 全方位渠道构建
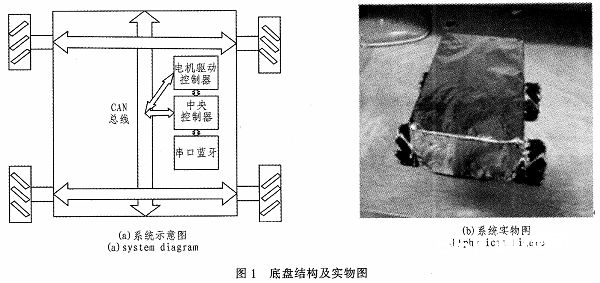
本文构建的全方位移动渠道如图1(a)所示,其由铝60毫米45度万向轮子、直流电机、电机驱动模块、12 V锂电池、MSP430f149最小体系操控板、串口蓝牙等部件构成。渠道操控器读取上位机通过蓝牙发送过来的数据进行相应动作相应完结操控,图1(b)为模型什物。
1.2 全方位运动学剖析及操控
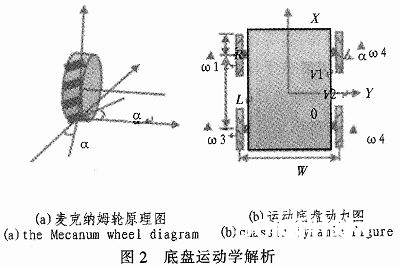
如图2(a)所示麦克纳姆轮的原理结构,其主轮周边散布着与轮子轴线成α=45度的小滚轮。滚轮能本身滚动一起又能绕车轴滚动,使得主轮具有了绕轮轴的滚动和沿滚轮轴线垂线方向运动的两个自在度。图2(b)所示为底盘运动力学剖析。通过对轮子的运动解析得到渠道的运动学方程为:
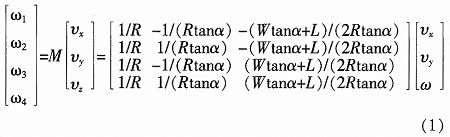
公式中(1)Vx,Vy,ω为操控量。本文选用通过单片机发生PWM信号调制功率Cn来完结底盘驱动操控。由公式(2),Cn是第n个电机的功率,ωn是核算出的第n个电机的转速,ωmax是n号电机在同一电压下设定的最大输出功率下的转速,mn是保护4个电机转速在同一最大值的实测参数。
![]()
2 人体深度图画及骨骼信息获取
文中选用kinect传感器获取人体深度图画及骨骼信息。它由RGB五颜六色摄像头、红外线发射器、红外线CMOS拍摄头号模块构成,能取得方针物体的深度图画数据和RGB图画数据。在深度图画数据的基础上,运用骨骼追寻技能提取出人体骨骼信息。
3 骨骼运动信息辨认操控形式规划
3.1 关节视点核算办法
Kinect能够追寻人体四肢20个骨骼点,骨骼运动信息辨认操控形式指体系通过剖析人体骨骼点的运动数据辨认操控指令。本文选用了左右手肩关节点、左右手肘关节点、左右手腕关节点、左右手手关节点8个上肢关节点,通过辨认各关节的滚动视点来辨认关节的运动状况。本文运用kinect获取的人体骨骼数据以两肩中心为原点树立空间坐标系,依据各关节点的坐标构建向量进行向量运算,得出关节滚动视点,详细以核算右手肘关节滚动为例。
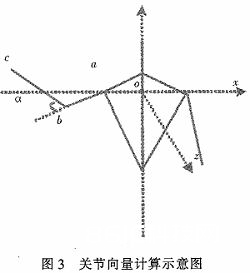
如图3所示,取a、b、c别离为右手的肩关节点、肘关节点、腕关节点,其对应空间坐标别离为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),肘关节的运动视点为α。则有
最终通过反解三角函数可得该关节的运动视点。
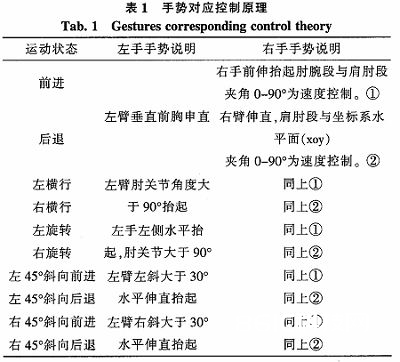
3.2 运动姿态对应操控指令
所以本文选用双手协作的办法,操控全向底盘的运作。从数学模型上咱们能够得出全向移动底盘有恣意轨道运动才能,可是因为运动轨道的方向性多,极易导致操控的不稳定性,反而让长处变为缺陷。由此咱们精简了运动的方向性,使其既满意全向运动的丰厚的能动性的一起也能保证其稳定性。由此见表.咱们设定了10种方向运动,并切割了不同的天然手势对应操控指令。
4 手势辨认形式规划
4.1 布景切割
在依据图画数据进行手势辨认的时分需求提取操作者的手势,首要咱们需求将人物的手掌部分和布景信息切割开来。依据kinect提取的深度数据,本文选用依据阈值切割法来进行布景切割,即提取远景的均匀深度值,对场景进行切割。深度阈值的设定公式为:
μmax=ω+ε (6)
其间ω为试验测定能精确切割手掌的最小值,ε为依据实践运用场景自在设定的可调理值,μmax为能精确辨认手掌的间隔空间。
4.2 手势辨认
文中选用了Y—H.Lin提出的一种模板匹配算法处理提取出来的手势并进行手势辨认。该算法首要将提取到的二维图画转换成一维向量,消除平面内图形放缩、旋转带来的影响。一起,针对同种手势结构多种份额的参阅模板向量,并将提取出的手势向量与参阅模板进行手势比对,然后得出比对成果。
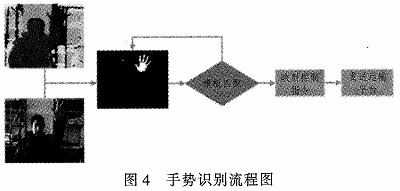
4.3 体系流程图
体系运用手势辨认进行操控时流程图如图4所示。
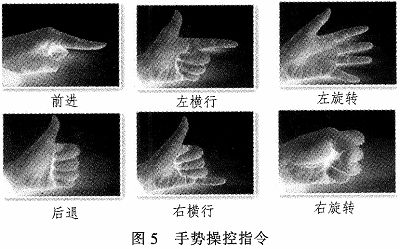
4.4 手势对应指令
针对当时操控形式的运用场景,本文针对运送渠道规划了6中运动指令,满意操作者进程的简略方便精确的操控需求,详细手势对应指令如图5所示。
5 试验剖析
本文操控体系上位机选用的Kinect开发工具为Kinect Software Devel-opment Kit(SDK)v1.8,开发环境为Visual Studio 2013,运用的编程言语为C#。
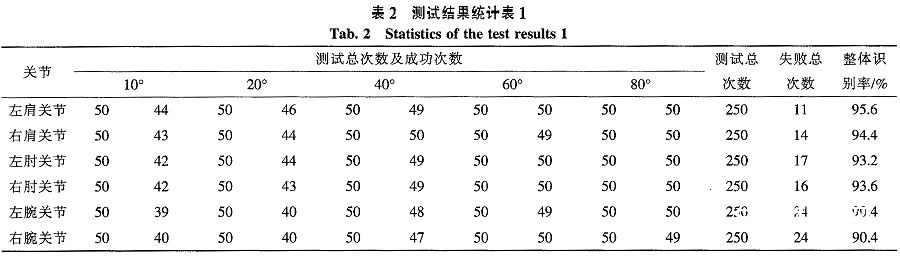
5.1 骨骼运动信息辨认操控形式有用性测验
这一形式的运用的成功与否在于对运用的各关节点滚动视点的辨认有用性。据此,咱们对左右肩关节、肘关节、腕关节6个咱们运用的关节点进行了滚动视点辨认测验。详细测验办法如下:咱们选择体型身高均有差异的10个人,每一个关节的滚动视点设为10°、20°、40°、60°、80°5种状况,每种状况每人测验5次,即每个关节累积进行250次试验,视点答应差错±30°。去除偶尔失常成果试验计算成果如表4所示。从表中能够有如下发现:由左右肩关节到左右腕关节3个节点的辨认率顺次下降;滚动视点越大,辨认的成功率越高。发生以上现象的原因是kinect辨认人体关节视点跟人体姿态改变起伏有关,而人体各关节点的人体姿态起伏又取决于关节点为方位和关节点的滚动视点,故肩关节的辨认精确率最高,同一个关节点滚动视点越大,辨认率越高。尽管如此,各关节在各滚动视点的辨认率都超越90%,具有较高的辨认成功率,契合操控要求。
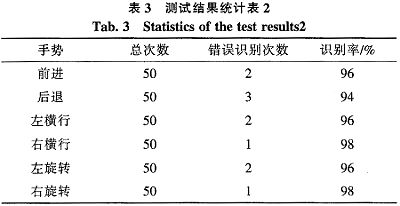
5.2 手势辨认测验
针对提出的几种操控手势,咱们展开了辨认精确率测验,详细测验办法为咱们选择了手型不必的5人对每种手势进行了10次辨认测验,即每种手势测验50次。成果如表所示,咱们能够发现,因为咱们选用的手势区分度比较大且手势类别数量较小,所以手势辨认精确度较高,契合操控要求。
5.3 全体操控性验证
进行完了两种体感操控形式辨认的有用性后,为实践查验运送渠道的操控功能,咱们运用黑色胶带在平坦的地上布局了一个执行任务的场景,别离约请三位通过简略练习的操作人员进行操控测验每人运用2种形式别离操控3次,试验标明,3人均完结了悉数测验内容,但时刻和道路不一致,娴熟的操作者道路比不娴熟的操作者滑润,且耗时短。一起,肢体操控因为比手势操控操控更为精密所以均匀耗时善于手势操控。
6 定论
文中针对一种依据麦克纳姆轮的全方位运送渠道提出了依据kinect的骨骼运动信息辨认和依据深度手势辨认两种体感操控形式,经试验证明,两种操控形式均能满意操控要求且具有灵敏、高效等特色。






