


在激增的高质量传感器、牢靠衔接和数据剖析的一同推进下,工业功率迈上了新的台阶,而不断进步这些智能节点的主动化和移动化程度也能带来优点。在这些情况下,对传感器节点进行精细运动捕捉和方位盯梢成为事关运用胜败的中心。这样,智能农场就能够依据丰厚的地舆方位、传感器内容以及剖析学习成果来联合运用主动化地上车辆和航空器愈加有效地辅导地上作业。智能手术室将经典的扶引技能带到手术台上,供精细制导机械臂运用,其运用传感器交融技能来保证各种条件下的精准扶引。在多个范畴,依据运动的传感器成为移动运用的价值倍增器。
手机中遍及存在的消费类惯性传感器使人们对其精度遍及感到绝望,因而,在推进运动物联网(IoMT)的概念方面,迄今都没有什么成效。但是,新式高功用工业传感器能支撑精确的视点指向和精确的地舆定位功用,一同还能到达必要的尺度和本钱功率要求,故而现在又做好了推进运动物联网开展的预备。
工业体系智能检测的推进要素
工业机械和流程最具价值的前进会集在有形的体系级优势上,而这一般会带来规划和完成方面的应战,这些应战又会开展成新的问题解决计划和事务方式。这种体系级推进要素能够概括为三项寻求,即对资源功率、要害精度和更高安全性的寻求。瞄准这些横跨多个职业的改进的运用,包含跨过空中/地上/海上、室内/室外、短期/长时刻和人/机等,但无论如何,它们都依靠于一同的特色;即精度、牢靠性、安全性和智能处理与剖析,如表1所示。

表1. 运动物联网运用重要的体系特色转变成极具应战性的规划需求
多种类型的传感器成为方针运用规划使命的中心。方针规划触及的体系杂乱性要求依据广泛改变的条件下慎重考虑传感器质量和鲁棒性。尽管有些职业有或许出于便利考虑而挑选传感器(比如,运用手机上现已存在的传感器组合),但其他职业则会从头规划传感器组合,依据精度做出挑选,将传感器智能地结合起来,以全面、牢靠地掩盖方针体系情况。 智能检测
在传感器很多存在的布景下,这些已问世的智能型体系正在一些所谓的老练职业掀起革新,把农业变成智能农业,把根底设施变成智能根底设施,把城市变成智能城市。由于传感器被布置在这些环境中以搜集相关的情境信息,数据库办理和通讯方面呈现了新的应战,不只要求传感器之间的数据交融,而且要求完成跨渠道、跨时刻的杂乱交融(例如:对跨时刻的根底设施情况、前一年的农作物产值、交通情况及方式等进行依据云核算的剖析),如图1所示。
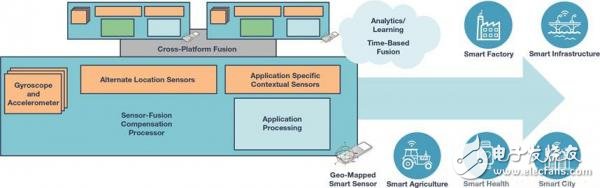
图1. 新式作业需求将情境和运动检测与多层交融结合起来。
从设备和环境中牢靠地抽取哪些信息的决议成为这些新式运用终究功效和开展前景的首要衡量方针。精度驱动功率,然后转变成必要的经济要素,一同也是保证安全、牢靠运转的要害。尽管大都根底传感器能够增加简略的功用,但增加的这些简略功用却无法满意方针运动物联网运用的需求,在这类运用中,是/否、上/下、开/关等情况会被更精细的分辩率替代,增加的功用会影响传感器的挑选。
运动的重要之处
大都情况下,物联网都处于运动情况。即便不处于运动情况——比如,停止的工业安全摄像头——精细指向仍或许必不可少,或许,关于无用运动(篡改)的常识也或许十分有价值。假如能在恶劣的飞翔条件下保持精确的指向视点,用光学载荷捕捉作物图画的无人机就有或许更快地带来更好的成果;假如能为光学数据供给精确的地舆测绘信息,则有或许完成对数据和趋势的前史比较。智能交通工具,无论是地上交通工具,仍是空中或海上交通工具,它们都越来越依靠GPS导航。但是,GPS遭受的精度压力也越来越大,无论是有意为之,仍是天然使然(建筑物、树木、地道等)。假如挑选时考虑了精度需求,则额定的传感器依然能够在事端中止期间牢靠地进行航向角核算。表2列出了使IoMT(运动物联网)中的M(运动)概念名符其实的一些要素,留意运动与通用运用之间的联系。

表2. 运动常识、乃至运动常识的缺少都事关多种运用的胜败
假如有时机和手法捕捉设备或人的天然惯性,抽取的体系情况含义就会得到增强,而且或许与可用的情境信息恰当地交融起来,如表3所示。

表3. 方位检测是物联网的价值倍增器
牢靠、安全的运动物联网节点
运动物联网节点输出的有效性和价值最为依靠的是中心传感器的质量以及它们高保真地捕捉运用情境的才能。因而,交融处理是传感器校对/增强的必然挑选,也是抱负捕捉传感器间情况动态的必备条件(例如,在恣意给定时刻点,哪个传感器最牢靠)。运用级的处理以分层办法融入解决计划之中,并依据环境特色进行优化,包含恰当的边界条件。尽管这种办法是主动的,但在有些情况下,这些节点会协同作业,比如在地上或空中成群的无人驾驶交通工具中。在这些情况下会布置安全链路,着重牢靠传输和受维护的特有身份信息,如图2所示。
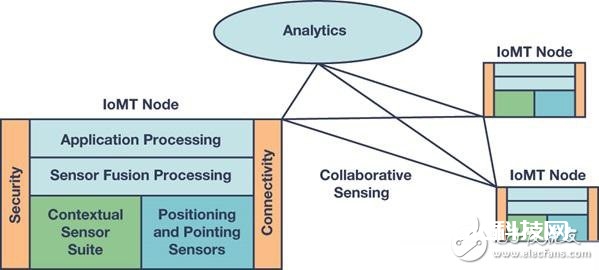
图2. 归纳情境和方位信息的互联安全传感器。
传感器是主动化的中心
就如人体相同,主动运动物联网节点依靠检测多个输入来完成需求的感知才能,然后独立举动并依据随机、乃至乱序事情优化其成果,终究随时刻改进。如表4所示,从根本丈量到操控、再到主动化的过渡会进步传感器交融层的杂乱性以及嵌入式设备核算的杂乱性。由于这些节点也会取得很高的互联才能和自适应性学习才能,所以他们或许走向人机交融。

表4.以高质量传感器为根底,日益进步的集成度和智能程度推进主动化和人机交融
没有根底设施的定位
GPS无处不在,除非卫星信号被阻挠或中止。在可用的条件下,无线测距技能或许十分精确。假如未受搅扰,一直都有磁场读数。惯性具有独有的自恃性。明显,惯性MEMS传感器有自身的缺乏(漂移),但这些缺乏都在可控规模以内,选用小尺度经济型封装的新式工业惯性丈量设备(IMU)具有史无前例的安稳性。
惯性MEMS器材选用规范半导体工艺、杂乱封装和集成方式,一般以线性加速度(g)或角速度(°/秒,或速率)为单位,直接检测、丈量和解读其运动,如图3所示。由于除要求最温文的运用以外,全部其他运用都具有所谓的多自由度(实际上指,能够在任何全部轴上运动,且全部设备在其运动中都彼此不受限),这就有必要捕捉x、y和z各轴的加速度和角速度值;或许在有些情况下,称为翻滚轴、俯仰轴和偏航轴。归纳起来,这些有时被称为六自由度惯性丈量单元。
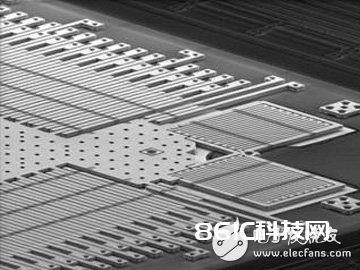
图3. 用于确认精细运动的微机电结构。
尽管经济上的考量天然会促进MEMS规划师用最少的硅片面积在各个轴上(x、y、z)抽取这些多个检测类型(加速度、角速度),但依然需求采纳愈加平衡的功用规划视角,以满意更具应战性的工业检测需求。事实上,有些MEMS结构在尝试用单个MEMS模块丈量全部6种方式。在调查这种办法关于高功用检测的有效性之前,咱们有必要知道,MEMS器材需求捕捉一些运动,这十分重要,但相同重要的是,同一器材还要能够抛弃会变成差错的其他方式的运动(或许不受其影响)。例如,尽管陀螺仪丈量角速率,但它相同应该能做到疏忽角速率丈量上的加速度或重力效应。对一个简略的MEMS器材来说,假如企图以小小的结构丈量全部,天然(在规划上)会十分简略遭到这些其他搅扰差错源的影响,而且无法把有用运动与无用运动差异开来。终究,这些差错源会变成导航或运用中的噪声和差错。
运动物联网要完成必要时进步资源功率、增加安全或要害精度的许诺,就需求比当今移动设备中无处不在的简略传感器具有更高的精度。着眼于功用的规划方式就变成了为每种检测方式和每个检测轴独立规划的方式,但其意图是走向交融和集成。终究,有必要知道的是,为功用规划并不一定意味着不能为经济考量而规划。
功用或功用
有些运用能够经过增加功用(设备的手势/方向方式切换)取得极大的价值,用简略的MEMS器材就能相对简略地取得这些信息。工业或专业器材或许更简略丈量不同方位的精度与亚度间的差值,或许能以优于一个数量级以上的精度分辩方位,一同还能在高振荡环境里作业。低端传感器与高端传感器之间的功用差异并不小,事实上,二者的差异十分大,在挑选组件时有必要慎重考虑。
终究运用将决议所需的精度水平,而所选的传感器质量将决议其能否完成。表5挑选了两种解决计划进行比较,阐明晰传感器挑选对规划进程和设备精度均很重要。假如只在很有限的情况下依靠传感器,而且运用有较高的容错性,那么能够运用低精度传感器——换言之,假如不是安全或生命攸关的运用,相对较低的精度便足够了。尽管大都消费级传感器在有利条件下噪声很低且功用杰出,但它们不适合用于动态运动(包含振荡)下的机器,由于功用较低的惯性丈量单元无法将动态运动与简略的线性加速度或所需的歪斜丈量差异开来。在工业环境中作业时,为完成优于1度的精度,应当挑选专门规划的传感器,以便按捺振荡或温度影响导致的差错漂移。这种高精度传感器能够支撑更大规模的预期运用情况,作业时刻也更长。
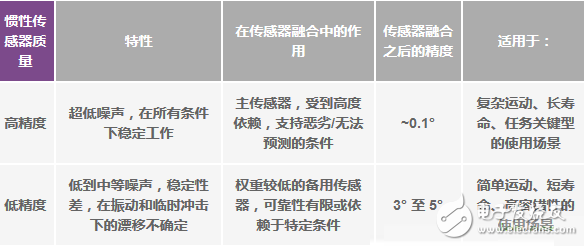
表5.推进精度和功效的是传感器的质量而非传感器交融的杂乱性
精细仪器规划师最感兴趣的一般是惯性丈量设备(IMU),这类设备输出的是经校准的加速度和速率而非运动视点或间隔,由于这种体系级的信息高度依靠于详细运用,因而是体系规划师而非惯性传感器规划师的作业重点。成果导致的问题,举例来说,是从惯性传感器标准表中分辩指向精度。
表6展现的是一款中端工业器材的标准,一同还用手机中常见的消费级传感器进行了比较。请留意,也有更高端的工业器材可用,其精度比表中所示器材要高一个数量级。大都低端消费级器材未供给比如线性加速度效应、振荡校对、视点随机游走之类的参数标准,而这些标准在工业运用中恰恰或许是最大的差错源。
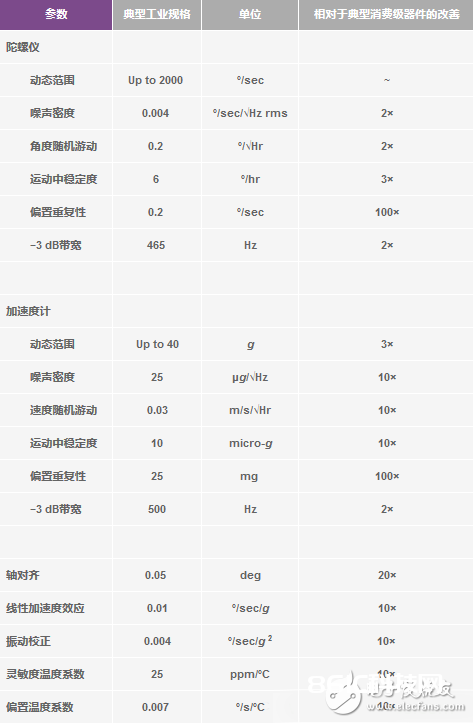
表6.工业MEMS器材对全部已知潜在差错源进行全面测定,一般能完成消费类器材高出一个数量级或更高的精度水平
这款工业传感器样品规划用于预期会有相对敏捷或极点运动(2000°/s、40 g)的场景,宽带宽传感器输出对最佳地区别信号也很要害。作业期间的失调漂移(运动中安稳度)应最小,以下降对更多补偿传感器(用来校对功用)的依靠。在某些情况下,运用无法为后端体系滤波校对供给所需的时刻,此刻有必要使开机漂移(可重复性)最小化。低噪声加速度计同陀螺仪一同运用,以协助差异并校对任何关于加速度的漂移。
陀螺仪传感器规划可用来直接消除任何加速度g事情(振荡、冲击、加速度、重力)对器材失调的影响,可大幅改进线性加速度;经过校准,温漂和对准均得以校对。若不进行对准校对,典型多轴MEMS器材即便集成到单片结构中,也或许有较大对准差错,使其成为差错核算的首要奉献要素。
近年来,噪声在差异传感器级别上所起的效果有所下降。在超出简略断定或相对停止运动确认的运用中,线性加速度效应和对准差错之类的参数成为噪声源,经过芯片规划办法或器材专用校准来改进它们需求支付昂扬的本钱。
传感器交融能补偿残次传感器吗?
答案很简略,不能。传感器交融是一个滤波和算法处理的进程,它将相关于环境、运动动态信息和运用情况对传感器组合进行兼并或办理。传感器交融能够供给确认性的校对(如温度补偿),并会依据体系情况常识,办理从一个传感器到另一个传感器的切换进程,但无法补偿传感器内涵的缺点。
在传感器交融规划中,最要害的使命是首先要深化发掘运用情况常识,为规划流程的剩下环节供给支撑和动力。针对给定的运用挑选恰当的传感器时,应先进行详细剖析,了解其在整体使命的不同阶段中的权重(相关性)。在行人导航定位核算示例中,解决计划首要取决于可用的设备(如智能手机中的嵌入式传感器),而不是经过功用规划。因而,会严峻依靠GPS以及其他可用的传感器,例如嵌入惯性和磁性传感器,仅为确认有用的方位信息发挥一小部分效果。它在室外能够正常作业,但在具有应战性的城市环境或室内,GPS就不精确了,其他可用传感器的质量很差,存在较大距离,换言之,方位信息的质量具有不确认性。尽管先进的滤波器和算法一般用来交融这些传感器的数据,无需任何额定传感器或质量更好的传感器,软 件关于补偿不确认性距离的效果不大,终究仅仅大大下降了报 告方位的决心。图4中为概念性阐明。
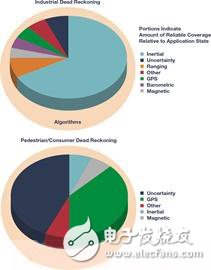
图4. 运用级精度取决于传感器质量而非传感器交融杂乱性。
与其构成鲜明对比的是,工业导航定位核算计划是针对体系功用界说而规划的,要依据详细精度要求挑选组件。更高质量的惯性传感器答应其发挥首要效果,恰当运用其他传感器来缩小不确认性距离。比起核算/预算牢靠的传感器读数间的方位,算法在概念上更重视最佳权重、切换和传感器互补,以及关于环境和实时运动动力学的知道。
精度在任何一种情况下都能够经过挑选质量更高的传感器来进步,尽管传感器滤波和算法是解决计划的重要一部分,但它们自身并不能消除低质传感器掩盖规模的距离。
新式工业传感器的功用现已挨近曾经用于导弹制导的传感器的水平。这些新式工业传感器选用开始针对牢靠和精细轿车运用规划并以经济型工艺制成的架构,在功用-本钱比和功用-尺度比如面具有共同的优势,如图5所示。

图5. 工业级6自由度IMU ADIS1647x和ADIS1646x,在杂乱和动态环境中也能供给高精度水平。
精细运动检测不再是小众运用的专属,其他运用也别无挑选,只得出资收购贵重的盯梢解决计划。跟着迷你型IMU工业级精细传感器的上市,物联网规划师现在能够经过整合优质运动检测功用和嵌入式情境检测功用,成倍进步其产品的价值。






