


MEMS传感器商场浪潮可以从最早的轿车电子到近些年来的消费电子,和行将来到的物联网年代。现在单一的传感器已不能满意人们对功用、智能的需求,像包含MEMS惯性传感器、MEMS环境传感器、MEMS光学传感器、乃至生物传感器等多种传感器数据交融将成为新年代传感器运用的趋势。
工欲善其事,必先利其器,这儿就先以MEMS陀螺仪开端,扼要介绍一下MEMS陀螺仪、首要功能参数和运用。
传统机械陀螺仪首要运用角动量守恒原理,即:对旋转的物体,它的转轴指向不会跟着承载它的支架的旋转而改变。MEMS陀螺仪首要运用科里奥利力(旋转物体在有径向运动时所遭到的切向力)原理,揭露的微机械陀螺仪均选用振荡物体传感角速度的概念,运用振荡来诱导和勘探科里奥利力。
MEMS陀螺仪的中心是一个微加工机械单元,在规划上依照一个音叉机制共振运动,经过科里奥利力原理把角速率转换成一个特定感测结构的位移。以一个单轴偏移(偏航,YAW)陀螺仪为例,经过图利讨论最简略的作业原理。
两个相同的质量块以方向相反的做水平震动,如水平方向箭头所示。当外部施加一个角速率,就会呈现一个科氏力,力的方向笔直于质量运动方向,如笔直方向箭头所示。发生的科氏力使感测质量发生位移,位移巨细与所施加的角速率巨细成正比。由于感测器感测部分的动电极(转子)坐落固定电极(定子)的侧边,上面的位移将会在定子和转子之间引起电容改变,因而,在陀螺仪输入部分施加的角速率被转化成一个专用电路可以检测的电子参数—电容量。

下图是一种MEMS陀螺仪的体系架构,,陀螺仪的信号调理电路可以分为马达驱动和加速度计感测电路两个部分。其间,马达驱动部分是透过静电引动办法,使驱动电路前后振荡,为机械元件供给鼓励;而感测部分透过丈量电容改变来丈量科氏力在感测质量上发生的位移。
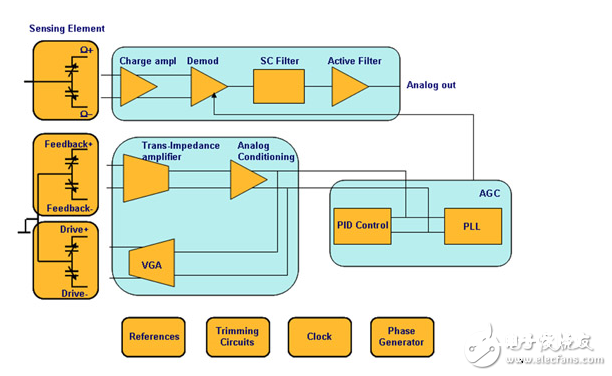
当然,MEMS陀螺仪还具有其它功用模块,比方自检功用电路,低功耗以及运动唤醒电路等等。
下面首要介绍MEMS陀螺仪的首要功能参数。
量程(动态规模) DYNANMIC RANGE
灵敏度 SENSORTIVITY RESOLUTION
零角速度输出(零位输出)ZERO OUTPUT
轴间交调灵敏度 INTER AXIS sensiTIvity
刻度因子
非线性度
线性加速度灵敏度
振荡灵敏度
零偏稳定性
噪声密度
视点随意游走体系
带宽
偏置电压灵敏度
自检功用
功耗
冲击生存才干
作业温度规模
封装差错
陀螺仪的量程一般以正、反方向输入角速率的最大值来标明,比方:+/-300 degree/sec。该值越大标明陀螺仪灵敏角速率的才干越强,在此输入角速率规模内,陀螺仪刻度因子非线性度能满意规则要求,一般陀螺仪的量程是可以装备的。
灵敏度(分辨率)标明在规则的输入角速率下能感知的最小输入角速率的增量,比方:0.05 degree/sec/LSB。一般来说MEMS陀螺仪的丈量规模越大,灵敏度会相应下降。
刻度因子(标度因数)是指陀螺仪输出量与输入角速率的比值。这个比值是用一特定的直线斜率标明的,该直线是依据整个输入角速率规模内测得的输入、输出数据,用最小二乘法拟合求得。
非线性度是在输入角速率规模内,陀螺仪输出量相对最小二乘法拟合直线的最大的差错与最大输出量之比,表征了陀螺仪实践输入和输出数据的违背程度,决议了该拟合数据的可信度。
线性加速度灵敏度反映的是陀螺仪对加速度的灵敏程度,单位是degree/sec/g。
振荡灵敏度是指陀螺仪对振荡的灵敏程度,单位是degree/sec/g2。陀螺仪对线性加速度和振荡越不灵敏,那么陀螺仪的功能越好,构建的算法也就越有用。
零偏是指陀螺仪在零输入状况下的输出,其用较长时刻输出的均值等效折算为输入角速率来标明,也便是观测值环绕零偏的离散程度,比方0.005 degree/sec标明每秒会漂0.005 degree。在零输入状况下的长时刻稳态输出是一个平稳的随机进程,即稳态输出将环绕均值(零偏)崎岖和动摇,习惯上用均方差来标明,这种均方差被界说为零偏稳定性。而初始零差错错可以理解为静态差错,它不会随时刻的动摇,可以用过软件校准。
当陀螺仪处于零输入状况时,掉落的输出信号为白噪声和慢变随机函数的叠加。漫变随机函数可用来确认零偏和零偏稳定性目标,白噪声界说为单位检测带宽平方根下等价旋转角速度的标准差错,单位(degree/sec/√Hz 或 degree/hr/√Hz)。这个白噪声也可以用单位为 degree/√Hz 的视点随意游走系数来标明,随机游走系数是指由白噪声发生的随时刻堆集的陀螺仪输出差错系数。当外界条件根本不变诗,可以以为上面所剖析的各种噪声的首要计算特性是不随时刻推移而改变的。
偏置电压灵敏度是指陀螺仪的输出对供电电源改变的灵敏程度,比方:0.03degree/sec/V,即供电电源每改变1V,输出角速率改变多少。
带宽是指陀螺仪可以准确丈量输入的角速率的频率规模,这个规模越大标明陀螺仪的动态呼应才干越强。
自检功用在运用前自动测试器材的机械和CMOS电路部分,以供给体系的鲁棒性。
功耗包含陀螺仪在不同分辨率或不同数据输出率下运行时的功耗,休眠功耗。在低功耗运用像可穿戴、物联网运用等范畴这个目标尤为重要。
冲击生存才干指陀螺仪接受不同程度下加速度冲击的才干,比方:2000g加速度冲击后陀螺仪确保体系正常作业。考虑到陀螺仪的运用环境可能会收到较大的冲击时,这个目标尤为重要,一般陀螺仪遭到超越它的加速度接受规模会挂掉,有必要重启上电后才干正常作业。
MEMS陀螺仪的机械架构决议了温度会影响数据的输出,而超越作业温度规模可能会导致数据输出发生较大的差错。
封装差错是裸片对角线和封装对角线的夹角。






