


双极性步进电机的基础知识
双极性步进电机包括两绕组,为了使电机运转平稳,不断的给这两个线圈加以相位差90度的正弦波,步进电机就开端滚动起来。
一般,步进电机不是由模仿线性放大器驱动;而是由PWM电流调理驱动,把线性的正弦波信号转化成了离散的直线段信号。 正弦波可被分红多段,跟着段数的添加,波形不断挨近正弦波。 实践运用中,段数多从4到2048或更多,大多数步进驱动IC选用4到64段细分。整步驱动,每一时刻只要一个相通电,两相电流替换和电流方向切换,使得总共产生四个步进电机机械状况。半步驱动,比整步驱动方法相对杂乱一些,在同一时刻,或许两个相都需要被通电,如图1所示,使电机的步进分辨率进步了一倍。细分驱动,电机转子走一步的视点将会跟着细分数的添加而减小,电机滚动也越来越平稳,例如把一个32段细分序列称为八分之一步驱动形式(见图1)。
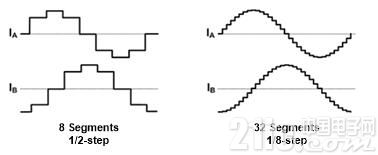
图1:细分驱动的电流波形。
电流操控精度的重要性
双极性步进电机转子的方位取决于流经两个线圈绕组的电流的巨细。一般,挑选步进电机的首要目标为,精确的机械定位或精准的机械体系速度操控。所以绕组电流的精度操控对步进电机的平稳运转十分重要。
在机械体系中,有两个问题会导致不精确的电流操控:
?在低速运转或用步进电机用于定位操控的状况下,每一细分段电机运转的步数过错,导致过错的定位。
?在高速运转下,体系非线性会导致短期电机运转速度改动,使得力矩不稳,添加了电机噪声和振荡。
PWM操控和电流衰减形式(Decay Mode)
大多数的步进电机驱动IC,依托步进电机绕组的电感特性完成PWM电流调理。经过每个绕组对应的功率MOSFET组成的H桥电路,跟着PWM操控开端,电源电压被加到电机绕组上,然后产生驱动电流。一旦电流到达设定值,H桥就会切换操控状况,使得输出电流衰减。 必定固定时刻后,一个新的PWM周期又会开端,H桥再次产生线圈电流。
重复这一进程,使绕组电流上升和下降。经过电流采样和状况操控,能够调理操控每一段细分的峰值电流值。
在预期的峰值电流到达后,H桥驱动绕组的电流衰减操控方法有两种:
?绕组短路(一起注册低侧或高侧的MOSFET),电流衰减慢。
?H桥反导游通,或答应电流经过MOSFET的体二极管流转,电流衰减快。
这两种电流衰减方法称为慢衰减和快衰减(见图2)。
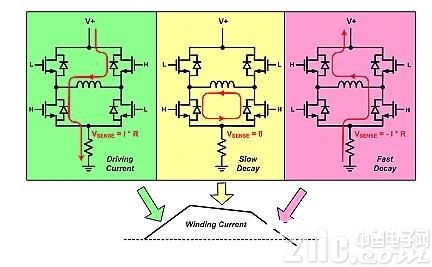
图2:H桥作业状况。
因为电机绕组是理性的,电流的改动率取决于施加的电压和线圈感值。要步进电机快速运转,抱负的状况便是是能够操控驱动电流在很短的时刻内改动。不幸的是,电机运动中会产生一个电压,其方向与外加电压相反,抵挡电流产生改动的趋势,称为“反电动势”。 所以电机转速越快,此反向电动势就越大,在它效果下电机随速度的增大而相电流减小,然后导致力矩变小。 为了减轻这些问题,要么进步驱动电压,要么下降电机绕组电感。 下降电感意味着用更少的匝数绕组,就需要更高的电流来到达相同的磁场强度和扭矩。
传统峰值电流操控的问题
传统的步进电机峰值电流操控,一般只检测经过线圈的峰值电流。 当预期的峰值电流到达后,H桥就会切换导通状况,使得输出电流衰减(快衰减,慢衰减,或两者的组合),持续必定固定时刻,或等一个PWM周期完毕。电流衰减时,驱动IC无法检测输出电流,然后导致一些问题。
一般来说,最好是用慢衰减,能够得到更小的电流纹波,均匀电流能更精确的盯梢峰值电流。 可是,跟着步率增大,慢衰减不能够及时下降绕组电流,无法确保精确的电流调理。
为了防止采样到开关电流尖峰,在每个PWM周期的开端,有一个十分短的时刻(blanking time)是不采样绕组电流的,那么此刻的电流便是不受操控的。这会导致严峻的电流波形畸变和电机运转的不稳定(见图3)。

图3:慢衰减形式下的电流畸变。
在正弦波到达峰值后,电流先开端衰减,然后又添加,直到H桥作业在高阻状况,电流才持续向零衰减。
为了防止这种状况,许多步进电机驱动芯片,在电流幅值添加的时分选用慢衰减形式,在电流幅值减小时运用快衰减或混合衰减(结合快衰减和慢衰减)形式。 可是,这两种衰减形式的均匀电流是是彻底不同的,因为快衰减形式时的电流纹波相对大许多。 成果便是,两种形式下的均匀电流值相差很大,导致电机运转不平稳(见图4)。
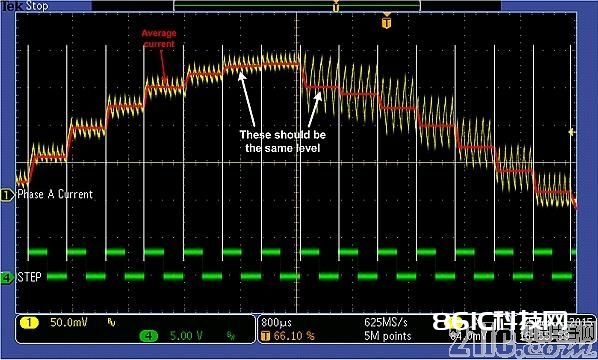
图4:传统峰值电流操控下的波形
如图4波形所示,峰值电流后一步和前一步的电机步进不一样,会导致方位差错和瞬时速度的改动。电流过零时,因为两种衰减形式的切换,也会有相同的问题。
双向电流采样
传统的步进驱动,在每个H桥下管源极和地之直接外部检测电阻,只丈量PWM导通时检测电阻上的正向电压。在慢衰减形式下,电流循环经过内部MOSFET,不经过检测电阻,因而无法丈量电流。在快衰减形式下,经过电阻的电流翻转,产生的是负电压。关于现在的电源IC工艺,负电压很难被简略的采样处理。
假如咱们能够监控电流衰减时期的绕组电流,许多步进电机驱动的电流调理问题就能被处理。可是,如上所说经过外部检测电阻很难完成,更好的挑选是测验内部电流检测。内部电流检测答应在任何时分监测电流,如PWM导通时刻,以及快衰减和慢衰减进程中。 尽管它添加了驱动IC的杂乱性,但内部电流检测大大下降了体系本钱,因为外部的采样电阻不需要了。 这些电阻十分大且贵重,价格一般和驱动IC差不多!
MP6500步进驱动IC
MP6500双极性步进电机驱动芯片,集成内部电流检测,很好的替代了传统廉价的峰值电流操控双极步进电机的驱动IC。MP6500内部电路框图如图5所示。
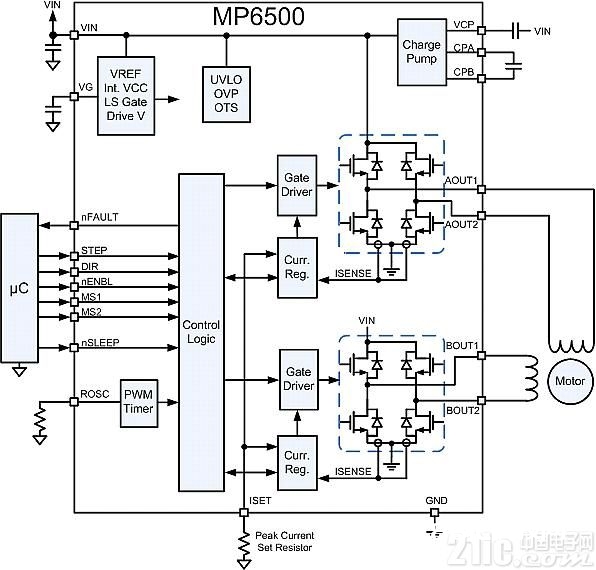
图5:MP6500电路框图。
MP6500最大驱动电流峰值为2.5A(详细取决于封装和PCB规划);电源电压规模从4.5V至35V。 支撑整步,半步,四分之一步,八分之一步驱动形式。不需要外部电流检测电阻,只需要一个接地的小型、低功耗电阻去设定绕组电流峰值。
内部电流检测依赖于精准的功率管及相关电路的匹配规划,能够确保一向精确采样绕组电流,然后进步步进电机的运转质量。
一般状况下, MP6500作业在慢衰减形式下。可是,当一个固定关断时刻完毕,慢衰减完毕后,假如当时绕组电流仍高于预期水平,快衰减形式会被敞开以用来敏捷减小驱动电流到所需值。 这种混合操控形式,使得驱动电流快速下降到零,一起又确保均匀电流尽量挨近设定值。 当step跳变时,快衰减就被选用使得当时电流敏捷被调整到零,如图6所示。
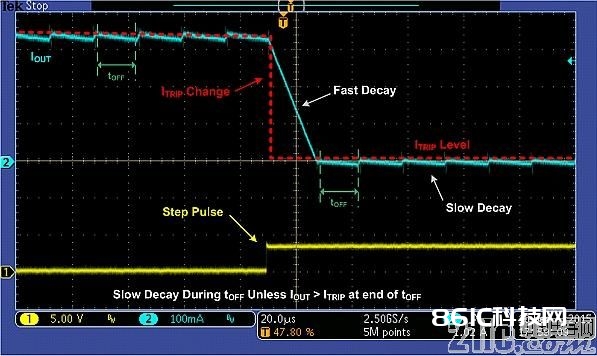
图6:MP6500的主动衰减形式(step跳变时)。
假如电源电压高,电感值低,或所需的峰值电流幅值很低,电流很有或许高于设定值。因为blanking time,每个PWM周期都会有一个最小导通时刻,此刻许多传统的步进电机驱动器无法操控绕组电流。假如产生这种状况,MP6500会不断选用快阑珊形式来确保绕组电流一向不超越设定值(见图7)。
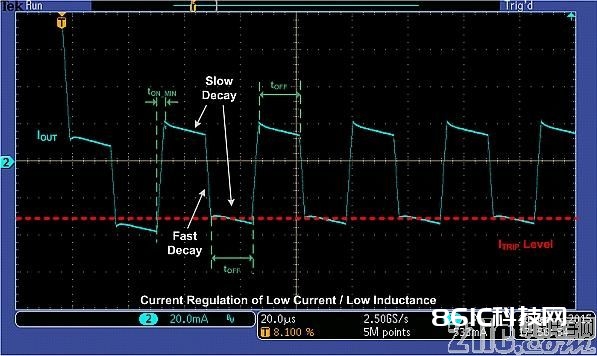
图7: MP6500的主动衰减形式(低电流状况下)。





