


脉冲宽度调制脉冲宽度调制(PWM),是英文“Pulse Width ModulaTIon”的缩写,简称脉宽调制,是运用微处理器的数字输出来对模仿电路进行操控的一种十分有用的技能,广泛运用在从丈量、通讯到功率操控与改换的许多领域中。
脉冲宽度调制是一种模仿操控办法,其依据相应载荷的改动来调制晶体管栅极或基极的偏置,来完结开关稳压电源输出晶 体管或晶体管导通时刻的改动,这种办法能使电源的输出电压在作业条件改动时坚持稳定,是运用微处理器的数字输出来对模仿电路进行操控的一种十分有用的技能。
PWM操控技能以其操控简略,灵敏和动态呼应好的长处而成为电力电子技能最广泛运用的操控办法,也是人们研讨的热门。由于当今科学技能的开展现已没有了学科之间的边界,结合现代操控理论思维或完结无谐振软开关技能将会成为PWM操控技能开展的首要方向之一。
PWM(脉冲宽度调制)的根本原理
跟着电子技能的开展,呈现了多种PWM技能,其间包括:相电压操控PWM、脉宽PWM法、随机PWM、SPWM法、线电压操控PWM等,而在镍氢电池智能充电器中选用的脉宽PWM法,它是把每一脉冲宽度均持平的脉冲列作为PWM波形,经过改动脉冲列的周期能够调频,改动脉冲的宽度或占空比能够调压,选用恰当操控办法即可使电压与频率和谐改动。能够经过调整PWM的周期、PWM的占空比而到达操控充电电流的意图。
脉冲宽度调制(PWM)是一种对模仿信号电平进行数字编码的办法。经过高分辨率计数器的运用,方波的占空比被调制用来对一个详细模仿信号的电平进行编码。PWM信号仍然是数字的,由于在给定的任何时刻,满幅值的直流供电要么彻底有(ON),要么彻底无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模仿负载上去的。通的时分便是直流供电被加到负载上的时分,断的时分便是供电被断开的时分。只需带宽满足,任何模仿值都能够运用PWM进行编码。脉冲宽度调制(PWM)是一种对模仿信号电平进行数字编码的办法。经过高分辨率计数器的运用,方波的占空比被调制用来对一个详细模仿信号的电平进行编码。
PWM信号仍然是数字的,由于在给定的任何时刻,满幅值的直流供电要么彻底有(ON),要么彻底无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模仿负载上去的。通的时分便是直流供电被加到负载上的时分,断的时分便是供电被断开的时分。只需带宽满足,任何模仿值都能够运用PWM进行编码。
PWM(脉冲宽度调制)根本操控原理
PWM(Pulse Width ModulaTIon)操控——脉冲宽度调制技能,经过对一系列脉冲的宽度进行调制,来等效地获得所需求波形(含形状和幅值)。
PWM操控技能在逆变电路中运用最广,运用的逆变电路绝大部分是PWM型,PWM操控技能正是有赖于在逆 变电路中的运用,才确认了它在电力电子技能中的重要位置。
理论基础:
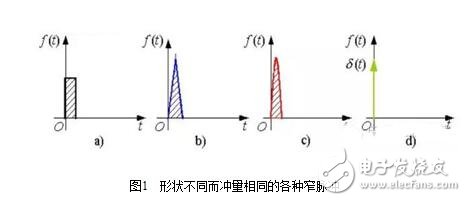
冲量持平而形状不同的窄脉冲加在具有惯性的环节上时,其作用根本相同。冲量指窄脉冲的面积。作用根本相同,是指环节的输出呼应波形根本相同。低频段十分挨近,仅在高频段略有差异。
面积等效原理:
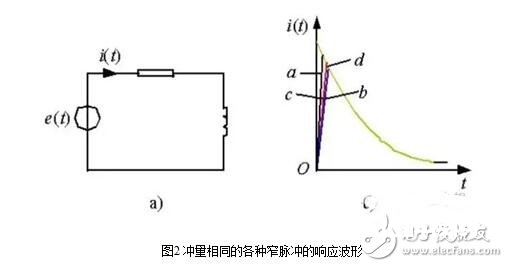
别离将如图1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图2a所示。其输出电流i(t)对不同窄脉冲时的呼应波形如图2b所示。从波形能够看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则简直彻底相同。脉冲越窄,各i(t)呼应波形的差异也越小。假如周期性地施加上述脉冲,则呼应i(t)也是周期性的。用傅里叶级数分化后将可看出,各i(t)在低频段的特性将十分挨近,仅在高频段有所不同。
用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,当作N个相连的脉冲序列,宽度持平,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)持平,宽度按正弦规则改动。
SPWM波形——脉冲宽度按正弦规则改动而和正弦波等效的PWM波形。
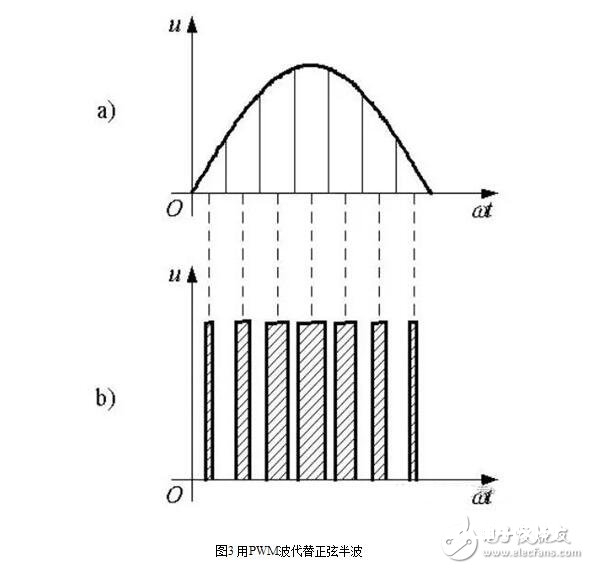
要改动等效输出正弦波幅值,按同一份额改动各脉冲宽度即可。
PWM电流波: 电流型逆变电路进行PWM操控,得到的便是PWM电流波。
PWM波形可等效的各种波形:
直流斩波电路:等效直流波形
SPWM波:等效正弦波形,还能够等效成其他所需波形,如等效所需非正弦沟通波形等,其根本原理和SPWM操控相同,也依据等效面积原理。
跟着电子技能的开展,呈现了多种PWM技能,其间包括:相电压操控PWM、脉宽PWM法、随机PWM、SPWM法、线电压操控PWM等,而本文介绍的是在镍氢电池智能充电器中选用的脉宽PWM法。它是把每一脉冲宽度均持平的脉冲列作为PWM波形,经过改动脉冲列的周期能够调频,改动脉冲的宽度或占空比能够调压,选用恰当操控办法即可使电压与频率和谐改动。能够经过调整PWM的周期、PWM的占空比而到达操控充电电流的意图。
PWM的分类
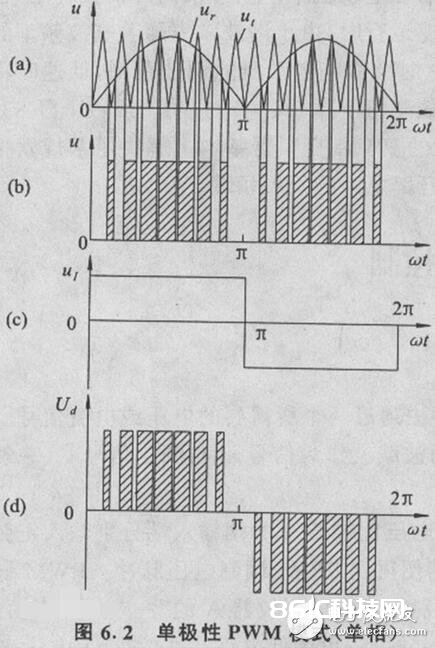
从调制脉冲的极性看,PWM又可分为单极性与双极性操控方式两种。
发生单极性PWM方式的根本原理如图6.2所示。首先由同极性的三角波载波信号ut。与调制信号ur,比较(图6.2(a)),发生单极性的PWM脉冲(图6.2(b));然后将单极性的PWM脉冲信号与图6.2(c)所示的倒相信号UI相乘,然后得到正负半波对称的PWM脉冲信号Ud,如图6.2(d)所示。
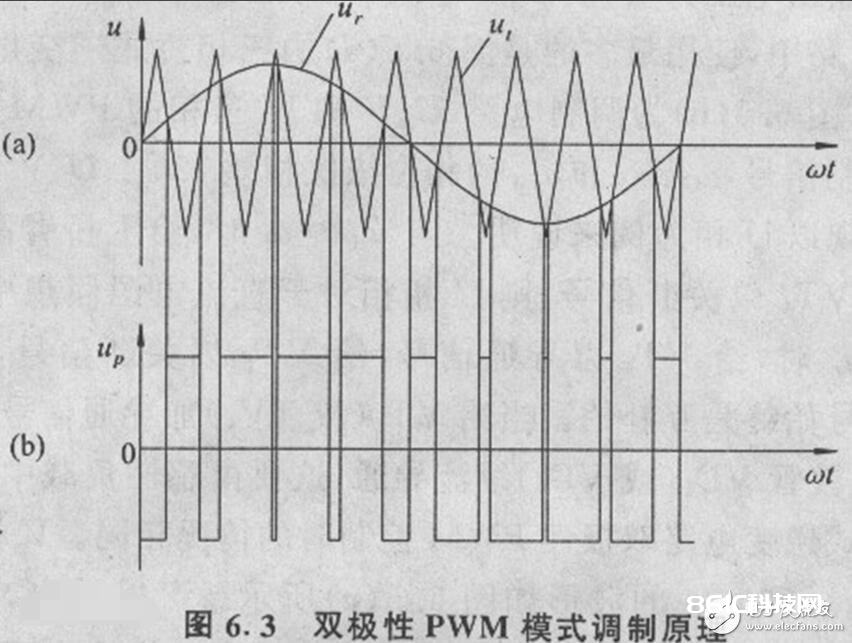
双极性PWM操控方式选用的是正负交变的双极性三角载波ut与调制波ur,如图6.3所示,可经过ut与ur,的比较直接得到双极性的PWM脉冲,而不需求倒相电路。
PWM的运用
PWM软件法操控充电电流
本办法的根本思维便是运用单片机具有的PWM端口,在不改动PWM方波周期的前提下,经过软件的办法调整单片机的PWM操控寄存器来调整PWM的占空比,然后操控充电电流。本办法所要求的单片机有必要具有ADC端口和PWM端口这两个有必要条件,别的ADC的位数尽量高,单片机的作业速度尽量快。在调整充电电流前,单片机先快速读取充电电流的巨细,然后把设定的充电电流与实践读取到的充电电流进行比较,若实践电流偏小则向添加充电电流的方向调整PWM 的占空比;若实践电流偏大则向减小充电电流的方向调整PWM的占空比。在软件PWM的调整进程中要注意ADC的读数误差和电源作业电压等引进的纹波搅扰,合理选用算术平均法等数字滤波技能。软件PWM法具有以下优缺陷。
长处:
简化了PWM的硬件电路,下降了硬件的本钱。运用软件PWM不必外部的硬件PWM和电压比较器,只需求功率MOSFET、续流磁芯、储能电容等元器材,大大简化了外围电路。
可操控涓流巨细。在PWM操控充电的进程中,单片机可实时检测ADC端口上充电电流的巨细,并依据充电电流巨细与设定的涓流进行比较,以决议PWM占空比的调整方向。
电池唤醒充电。单片机运用ADC端口与PWM的寄存器能够恣意设定充电电流的巨细,所以,关于电池电压比较低的电池,在上电后,能够采纳小电流充一段时刻的办法进行充电唤醒,并且在小电流的情况下能够近似以为恒流,对电池的冲击损坏也较小。
缺陷:
电流操控精度低。充电电流的巨细的感知是经过电流采样电阻来完结的,采样电阻上的压降传到单片机的ADC输入端口,单片机读取本端口的电压就能够知道充电电流的巨细。若设定采样电阻为Rsample(单位为Ω),采样电阻的压降为Vsample(单位为mV), 10位ADC的参阅电压为5.0V。则ADC的1 LSB对应的电压值为 5000mV/1024≈5mV。一个5mV的数值转化成电流值便是50mA,所以软件PWM电流操控精度最大为50mA。若想添加软件PWM的电流操控精度,能够设法下降ADC的参阅电压或选用10位以上ADC的单片机。
PWM选用软发动的办法。在进行大电流快速充电的进程中,充电从中止到从头发动的进程中,由于磁芯上的反电动势的存在,所以在从头充电时有必要下降PWM的有用占空比,以战胜由于软件调整PWM的速度比较慢而带来的无法操控充电电流的问题。
充电功率不是很高。在快速充电时,由于选用了充电软发动,再加上单片机的PWM调整速度比较慢,所以实践上中止充电或小电流慢速上升充电的时刻是比较大的。
为了战胜2和3缺陷带来的充电功率低的问题,咱们能够选用充电时刻比较长,而中止充电时刻比较短的充电办法,例如充2s停50ms,再加上软发动时的电流慢速发动折组成的中止充电时刻,设定为50ms,则实践充电功率为(2000ms-100ms)/2000ms=95%,这样也能够确保充电功率在90%以上。
纯硬件PWM法操控充电电流
由于单片机的作业频率一般都在4MHz左右,由单片机发生的PWM的作业频率是很低的,再加上单片机用ADC办法读取充电电流需求的时刻,因此用软件PWM的办法调整充电电流的频率是比较低的,为了战胜以上的缺陷,能够选用外部高速PWM的办法来操控充电电流。现在智能充电器中选用的PWM操控芯片首要有TL494等,本PWM操控芯片的作业频率能够到达300kHz以上,外加阻容元件就能够完结对电池充电进程中的恒流限压作用,单片机只须用一个一般的I/O端口操控TL494使能即可。别的也能够选用电压比较器代替TL494,如LM393和LM358等。选用纯硬件PWM具有以下优缺陷。
长处:
电流精度高。充电电流的操控精度只与电流采样电阻的精度有关,与单片机没有联系。不受软件PWM的调整速度和ADC的精度约束。
充电功率高。不存在软件PWM的慢发动问题,所以在相同的恒流充电和相同的充电时刻内,充到电池中的能量高。
对电池危害小。由于充电时的电流比较稳定,动摇起伏很小,所以对电池的冲击很小,别的TL494还具有限压作用,能够很好地保护电池。
缺陷:
硬件的价格比较贵。TL494的运用在带来以上长处的一起,添加了产品的本钱,能够选用LM358或LM393的办法进行战胜。
涓流操控简略,并且是脉动的。电池充电完毕后,一般选用涓流充电的办法对电池保护充电,以战胜电池的自放电效应带来的容量损耗。单片机的一般I/O操控端口无法完结PWM端口的功用,即便能够用软件模仿的办法完结简略的PWM功用,但由于单片机作业的实时性要求,其软件模仿的PWM频率也比较低,所以终究选用的仍是脉冲充电的办法,例如在10%的时刻是充电的,在别的90%时刻内不进行充电。这样对充满电的电池的冲击较小。
单片机 PWM操控端口与硬件PWM交融
关于单纯硬件PWM的涓流充电的脉动问题,能够选用具有PWM端口的单片机,再结合外部PWM芯片即可处理涓流的脉动性。
在充电进程中能够这样操控充电电流:选用恒流大电流快速充电时,能够把单片机的PWM输出悉数为高电平(PWM操控芯片高电平使能)或低电平(PWM操控芯片低电平使能);当进行涓流充电时,能够把单片机的PWM操控端口输出PWM信号,然后经过测验电流采样电阻上的压降来调整PWM的占空比,直到符合要求停止。
PWM一般选用电压操控型逆变器,是经过改动功率晶体管替换导通的时刻来改动逆变器输出波形的频率,改动每半周期内晶体管的通断时刻比,也便是说经过改动脉冲宽度来改动逆变器输出电压副值的巨细。
其整流部分与逆变部分根本是对称的。
总归,最终的输出波形可调,副值可调,乃至功率因数也可调,不过,好象都是用正弦波做为基波的啦。
模仿电路
模仿信号的值能够接连改动,其时刻和起伏的分辨率都没有约束。9V电池便是一种模仿器材,由于它的输出电压并不准确地等于9V,而是随时刻发生改动,并可取任何实数值。与此相似,从电池吸收的电流也不限定在一组或许的取值规模之内。模仿信号与数字信号的差异在于后者的取值一般只能归于预先确认的或许取值调集之内,例如在{0V, 5V}这一调集中取值。
模仿电压和电流可直接用来进行操控,如对轿车收音机的音量进行操控。在简略的模仿收音机中,音量旋钮被衔接到一个可变电阻。拧动旋钮时,电阻值变大或变小;流经这个电阻的电流也随之添加或削减,然后改动了驱动扬声器的电流值,使音量相应变大或变小。与收音机相同,模仿电路的输出与输入成线性份额。
尽管模仿操控看起来或许直观而简略,但它并不总是十分经济或可行的。其间一点便是,模仿电路简略随时刻漂移,因此难以调理。能够处理这个问题的精细模仿电路或许十分巨大、粗笨(如旧式的家庭立体声设备)和贵重。模仿电路还有或许严峻发热,其功耗相关于作业元件两头电压与电流的乘积成正比。模仿电路还或许对噪声很灵敏,任何扰动或噪声都肯定会改动电流值的巨细。
数字操控
经过以数字办法操控模仿电路,能够大起伏下降体系的本钱和功耗。此外,许多微操控器和DSP现已在芯片上包括了PWM操控器,这使数字操控的完结变得愈加简略了。
简而言之,PWM是一种对模仿信号电平进行数字编码的办法。经过高分辨率计数器的运用,方波的占空比被调制用来对一个详细模仿信号的电平进行编码。PWM信号仍然是数字的,由于在给定的任何时刻,满幅值的直流供电要么彻底有(ON),要么彻底无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模仿负载上去的。通的时分便是直流供电被加到负载上的时分,断的时分便是供电被断开的时分。只需带宽满足,任何模仿值都能够运用PWM进行编码。
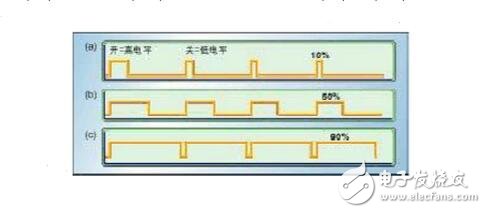
图1显现了三种不同的PWM信号。图1a是一个占空比为10%的PWM输出,即在信号周期中,10%的时刻通,其他90%的时刻断。图1b和图1c显现的别离是占空比为50%和90%的PWM输出。这三种PWM输出编码的别离是强度为满度值的10%、50%和90%的三种不同模仿信号值。例如,假定供电电源为9V,占空比为10%,则对应的是一个起伏为0.9V的模仿信号。
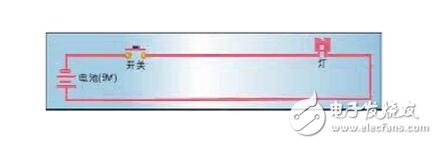
图2是一个能够运用PWM进行驱动的简略电路。图中运用9V电池来给一个白炽灯泡供电。假如将衔接电池和灯泡的开关闭合50ms,灯泡在这段时刻中将得到9V供电。假如鄙人一个50ms中将开关断开,灯泡得到的供电将为0V。假如在1秒钟内将此进程重复10次,灯泡将会点亮并象衔接到了一个4.5V电池(9V的50%)上相同。这种情况下,占空比为50%,调制频率为10Hz。
大多数负载(无论是电理性负载仍是%&&&&&%性负载)需求的调制频率高于10Hz。想象一下假如灯泡先接通5秒再断开5秒,然后再接通、再断开……。占空比仍然是50%,但灯泡在头5秒钟内将点亮,鄙人一个5秒钟内将平息。要让灯泡获得4.5V电压的供电作用,通断循环周期与负载对开关状况改动的呼应时刻比较有必要满足短。要想获得调光灯(但坚持点亮)的作用,有必要进步调制频率。在其他PWM运用场合也有相同的要求。一般调制频率为1kHz到200kHz之间。
硬件操控器
许多微操控器内部都包括有PWM操控器。例如,Microchip公司的P%&&&&&%16C67内含两个PWM操控器,每一个都能够挑选接通时刻和周期。占空比是接通时刻与周期之比;调制频率为周期的倒数。履行PWM操作之前,这种微处理器要求在软件中完结以下作业:
* 设置供给调制方波的片上定时器/计数器的周期
* 在PWM操控寄存器中设置接通时刻
* 设置PWM输出的方向,这个输出是一个通用I/O管脚
* 发动定时器
* 使能PWM操控器
尽管详细的PWM操控器在编程细节上会有所不同,但它们的根本思维一般是相同的。
通讯与操控
PWM的一个长处是从处理器到被控体系信号都是数字方式的,无需进行数模转化。让信号坚持为数字方式可将噪声影响降到最小。噪声只要在强到足以将逻辑1改动为逻辑0或将逻辑0改动为逻辑1时,也才能对数字信号发生影响。
对噪声反抗才能的增强是PWM相关于模仿操控的别的一个长处,并且这也是在某些时分将PWM用于通讯的首要原因。从模仿信号转向PWM能够极大地延伸通讯间隔。在接纳端,经过恰当的RC或LC网络能够滤除调制高频方波并将信号还原为模仿方式。
PWM广泛运用在多种体系中。作为一个详细的比如,咱们来调查一种用PWM操控的制动器。简略地说,制动器是紧夹住某种东西的一种设备。许多制动器运用模仿输入信号来操控夹紧压力(或制动功率)的巨细。加在制动器上的电压或电流越大,制动器发生的压力就越大。
能够将PWM操控器的输出衔接到电源与制动器之间的一个开关。要发生更大的制动功率,只需经过软件加大PWM输出的占空比就能够了。假如要发生一个特定巨细的制动压力,需求经过丈量来确认占空比和压力之间的数学联系(所得的公式或查找表经过改换可用于操控温度、外表磨损等等)。
例如,假定要将制动器上的压力设定为100psi,软件将作一次反向查找,以确认发生这个巨细的压力的占空比应该是多少。然后再将PWM占空比设置为这个新值,制动器就能够相应地进行呼应了。假如体系中有一个传感器,则能够经过闭环操控来调理占空比,直到准确发生所需的压力。
总归,PWM既经济、节省空间、抗噪功能强,是一种值得广阔工程师在许多规划运用中运用的有用技能。





