


项目及可行性剖析
项目名称:依据FPGA的三相直流无刷电动机变频操控的远洋捕捉设备电路规划
项目主要内容:远洋捕捉设备在实践的作业进程中要具有依据鱿鱼分量的巨细而主动调理为加快或减速状况的功用,而且要具有计量钓绳长度的才能以完成当钓绳被悉数卷起时钓机主动间断的功用。
本项目选用FPGA操控三相直流电机,运用其间的EAB能够构成寄存电机各相电流所需的操控波形数据表和运用FPGA规划的数字比较器能够同步发生多路PWM电流波形,对三相直流电机进行灵敏操控,然后满意远洋捕捉设备在实践作业进程中的所需。
立异性:运用XLINX公司的FPGA、功率器材智能模块IPM PS21865 和霍尔传感方位侦测,完成直流无刷电动机驱动和调速,直流无刷电动机BLDC选用电子换向器代替了传统直流电动机的机械换向设备,克服了电刷和换向器所引起的噪声、火花、电磁搅扰、寿命短等弊端。直流无刷电动机既具有沟通电动机的结构简略、作业牢靠、维护便利等。而这些用传统的单片机和DSP的操控都难以到达相同的操控效果。
实用性:运用FPGA完成多路PWM操控,无须外接D/A转换器,使外围操控电路大大简化,操控方法简练,操控精度高、操控效果好;操控器选用通用的微操控器AT89S51,技能老练,本钱低价。
可完成性:
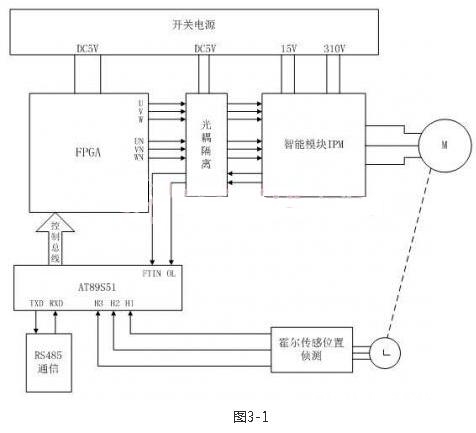
FPGA模块规划是经过查询ROM的方法,获取所存储的PWM波形数据,再经由数字比较器发生相应的PWM波形输出。FPGA模块在接纳到操控器AT89S51模块发送过来的指令后,经过对地址计数器进行操控而获取不同PWM波形数据,能够输出三相直流电机的旋转方向、滚动速度、作业/间断状况的操控信号。
IPM模块对FPGA模块输出的操控信号进行功率放大,然后完成对三相直流电机速度的操控。一起,IPM模块也会回来三相直流电机的过载维护和犯错维护信号到操控器AT89S51模块,操控器模块在接纳到过载维护和犯错维护信号之后会向FPGA模块宣布间断指令,FPGA模块依据指令间断三相直流电机的作业,然后起到维护电机的效果。
项目实施方案
方案底子结构图
方案描绘
现在大多数远洋渔船装备的远洋捕捉设备电源操控,仍是选用以往的稳恒输出方法,即电源操控电动机的信号安稳,以完成匀速操控钓线设备。在实践运用进程傍边暴露出许多问题,传统的操控方法不能主动应对一些特殊情况,比方捕捉鱼类数量忽然增多形成钓机过载,或许因为掉落形成捕捉设备空载,以及钓线设备现已收回完毕,电动机不能主动间断,这时候无法及时变频操控电动机的电源输出,极容易发生事端。所以电动机变频及操控的问题需求得到及时处理。咱们小组成员方案运用FPGA技能,规划一个三相直流无刷电动机变频操控的远洋捕捉设备电路。以到达灵敏智能操控钓线设备,应对特殊情况。
直流电机无刷操控原理
电动机的定子绕组多做成三相对称星形接法,与三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有方位传感器。驱动器由功率电子器材和%&&&&&%等构成,功用是:承受电动机的发动、间断、制动信号,以操控电动机的发动、间断和制动;承受方位传感器信号和正回转信号,用来操控逆变桥各功率管的通断,发生接连转矩;承受速度指令和速度反应信号,用来操控和调整转速;供给维护和显现等。直流无刷电动机的操控原理简图如图3-2 。
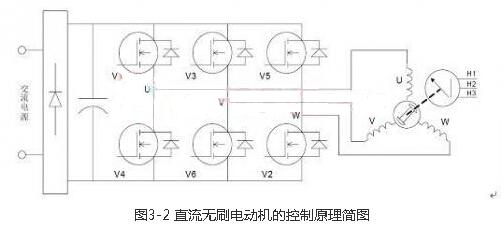
主电路是一个典型的电压型交-直-交电路,逆变器供给等幅等频5-24KHz调制波的对称交变矩形波。永磁体N-S替换交流,使方位传感器发生相位差120°的H3、H2、H1方波,然后发生有用的六状况编码信号:010、011、001、101、100、110,经过逻辑组件处理发生V6-V1导通、V5-V6导通、V4-V5导通、V3-V4导通、V2-V3导通、V1-V2导通,也就是说将直流母线电压顺次加在U->V、W->V、W->U、V->U、V->W、U->W上,这样转子每转过一对N-S极,V1、V2、V3、V4、V5、V6各功率管即按固定组合成六种状况的顺次导通。每种状况下,仅有两相绕组通电,顺次改动一种状况,定子绕组发生的磁场轴线在空间滚动60°电视点,转子跟从定子磁场滚动相当于60°电视点空间方位,转子在新方位上,使方位传感器U、V、W按约好发生一组新编码,新的编码又改动了功率管的导通组合,使定子绕组发生的磁场轴再行进60°电视点,如此循环,直流无刷电动机将发生接连转矩,拖动负载作接连旋转。
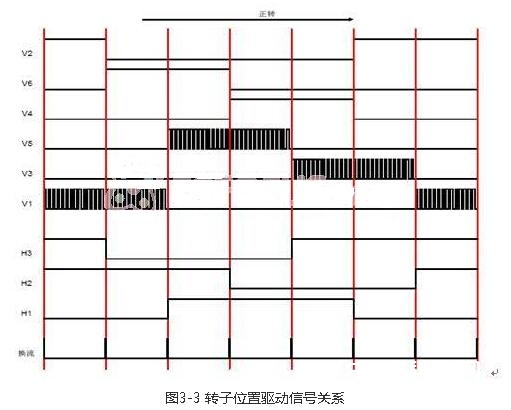
本方案选用120度方波的算法驱动IPM的内置IGBT然后来驱动直流无刷电动机。对IGBT信号的分配必定和电动机的方位有着严密的联络,从BLDC的霍尔传感器反应回来的方位信号经过编码后是:010、011、001、101、100和110六种状况,所以能够依据这六种方位状况信息来分配IGBT的驱动信号。在这里咱们优先选用了IGBT的上桥臂用分配PWM信号,下桥臂分配凹凸电平的驱动方法,所以能够经过改动上桥臂PWM的占空比来改动加在直流无刷电动机上的端电压。信号分配和方位联系如图3-3所示。
 其间:V1、V2、V3、V4、V5和V6表明IGBT组成的三相全控桥电路,上桥的V1、V3和V5三个功率管,下桥的V2、V4和V6三个功率管,别离操控这U、V和W三相直流电的流向,如图1-1所示衔接方法。H1、H2和H3是霍尔传感器的三个信号出线。
其间:V1、V2、V3、V4、V5和V6表明IGBT组成的三相全控桥电路,上桥的V1、V3和V5三个功率管,下桥的V2、V4和V6三个功率管,别离操控这U、V和W三相直流电的流向,如图1-1所示衔接方法。H1、H2和H3是霍尔传感器的三个信号出线。假如正转的方位信号和驱动信号的联系如图2所示:010(H3 H2 H1)V6-V1、011(H3 H2 H1)V5-V6、001(H3 H2 H1)V4-V5、101(H3 H2 H1)V3-V4、100(H3 H2 H1)V2-V3、110(H3 H2 H1)V1-V2的次序来换流的话,那幺咱们能够相同依据方位信号给出回转时驱动信号的换流联系。即:001(H3 H2 H1)V1-V2、011(H3 H2 H1)V2-V3、010(H3 H2 H1)V3-V4、110(H3 H2 H1)V4-V5、100(H3 H2 H1)V5-V6、101(H3 H2 H1)V6-V1。详细电机的相序一定要搞清楚,假如换流不对或不妥的话直流无刷电动机就会左右振荡底子旋转不起来,或许电流很大且电流波形是不对的。
经过上述操控信号来操控各个功率管的on/off,使得电流依序流入U、V、W三相线圈,而在直流无刷电动机的内部发生旋转磁场,如图3-4所示,指出了在操控信号的效果下各相的电压、电流方向的联系。

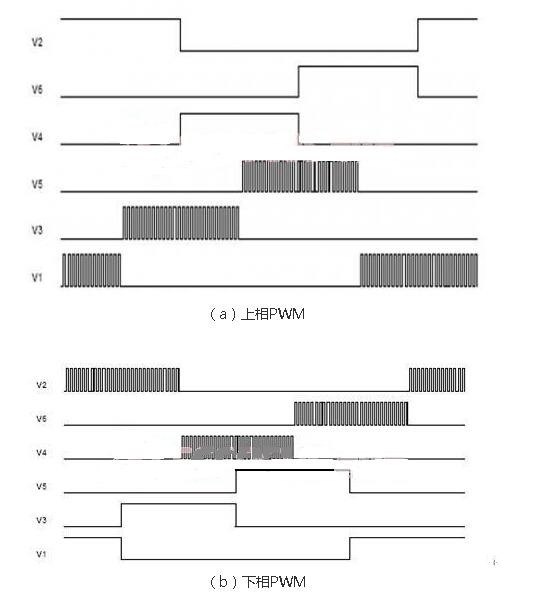
在操控功率组件的信号中参加PWM,调整PWM的占空比,即输出PWM的Duty,使得调整输入电动机的端电压的巨细,从而操控直流无刷电动机的转速,其间操控信号PWM的参加有四种方法:上相PWM、下相PWM、前半PWM和后半PWM。如图3-5所示。
FPGA调制PWM波形原理
拟选用FPGA操控三相直流电机,运用其间的EAB能够构成寄存电机各相电流所需的操控波形数据表和运用FPGA规划的数字比较器能够同步发生多路PWM电流波形,对三相直流电机进行灵敏操控。运用FPGA完成多路PWM操控,无须外接D/A转换器,使外围操控电路大大简化,操控方法简练,操控精度高、操控效果好。用单片机和DSP的操控都难以到达相同的操控效果。
FPGA模块规划是由PWM计数器、波形ROM地址计数器、PWM波形ROM存储器、比较器等模块组成。其间,PWM计数器在脉宽时钟效果下递加计数,发生阶梯形上升的周期性锯齿波,一起加载到各数字比较器的一端;PWM波形ROM输出的数据别离加载到各数字比较器的另一端。当PWM计数器的计数值小于波形ROM输出数值时,比较器输出低电平;当PWM计数器的计数值大于波形ROM输出数值时,比较器输出高电平。由此可输出周期性的PWM波形。依据三相直流电机对电流波形的要求,将各个时间细分电流波形所对应的数值寄存于波形ROM中,波形ROM的地址由地址计数器发生。经过对地址计数器进行操控,能够改动三相直流电机的旋转方向、滚动速度、作业/间断状况。





