现在做许多的智能车,都需求对车速进行操控.或匀速或变速,在调速算法中,PID的经典万古流芳.
其实,简略的51单片机尚能容易的完成滑润杰出的调速,更不用说功能优秀的单片机.可是,要做到最好,是需求很高的专业水平缓着手才能.可是,工程上能到达咱们的方针即可.
抱着”够用就好”的思维,咱们来开端咱们的调速旅程:
所谓的PID是必定根据一个闭环体系而言的,什么是闭环体系呢,我简略的介绍一下:

看上面的这个体系,就不是一个闭环体系,而是一个开环体系.再看下面的这个便是闭环体系:
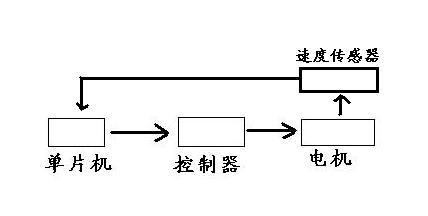
上图这个体系便是典型的闭环体系.咱们或许看出来了,”开环”体系,便是体系没有反应,是个”翻开的环”,而闭环体系,是有反应的,是一个完好的环形.
正是这个反应,就可以将当时电机的转速传递给体系操控端,假如电机转速快了,操控器就让它慢点(比方可以下降电机两头的电压),相同,假如速度传感器检测到转速低了,就应该让电机两头的电压进步一点.便是在这样的不断纠正中,电机的速度会坚持稳定.当然,这个纠正的周期是十分短的,纠正的速度是很快的.
有人说,不便是多了就少点,少了就多点嘛,干嘛运用什么玄乎的PID?
对,你说对了,”多了就少点,少了就多点”这自身便是PID里边的一种:P操控–只运用了P算法.
接下来咱们就看看究竟什么是PID,为什么要运用PID,怎么样运用PID:
P–份额
I–积分
D–微分
咱们来一条一条的解说P,I,D的含义及其含义:
P–份额部分
这个很好了解.比方说,速度传感器发现,当时速度是1200(每分钟).而咱们设定的速度值为1000,那么就差别了200,这时,假如我设定P为0.1,假如输入的电压就应该是Uo-0.1×200.看到了没有,这儿的份额的意思便是”倍数”,便是你要把这个差错扩大多少倍.”扩大”自身便是一个份额嘛.知道了这个,你就可以写一个PID操控里边的P操控了.许多时分,不需求I和D操控,单单一个P操控就足够了.到了这儿你就可以操控电机的速度了.
I–积分部分.
这个积分其实也很好了解.它是一个积分运算.有的时分差错不是很大,所以持续运转下去,会使体系存在一个差错.可是你假如运用I运算将这个差错累加起来,到了必定巨细的时分就进行处理.这样就能避免体系的差错累计.其实,在程序中,这个进程便是对一个小差错的接连累加算了.
D–微分部分.
这个部分也比较好了解.所谓的微分便是对变量求导呗,意思便是一个量的改变率呗.所以,微分部分便是可以将变量改变率放入核算中.这个量在编程中其实便是求前次的差错和这次的差错的差算了.
声明:本文内容来自网络转载或用户投稿,文章版权归原作者和原出处所有。文中观点,不代表本站立场。若有侵权请联系本站删除(kf@86ic.com)https://www.86ic.net/qiche/dianzi/261289.html








