


摘要:规划一款能够经过人体动刁难机器人进行操控的机器人操控系统。该系统由主机和从机两部分组成,经过Kinect体感传感器搜集人体动作信息,在主机中进行图画处理解分出相应的人体动作,然后经过无线传输单元向机器人发送相应的操控指令,操控机器人做出呼应,完结相应的一套动作或对人体动作进行实时仿照、制造的机器人样机运转杰出,能够依据人体左右手的动作和语音指令,做出正确的呼应。
跟着机器人操控技能的迅猛发展,各类机器人已广泛应用于工业、农业、国防、科研、教育以及人们的日常日子等许多范畴。但现在机器人的操控办法却不乏单调,传统意义上的操控根本上是经过遥控器、按钮、操作手柄来完结的。文中则供给了一种新的操控办法——体感操控,即操作者可直接经过手势对机器人进行操控,奇妙地将Kinect体感技能与机器人操控技能结合,创造性地完结了机器人操控办法上的立异,完结愈加天然的人机交互。
1 整体结构与作业原理
本操控系统以Kinect体感传感器作为图画搜集东西,结合机器人操控技能,完结了人体动刁难机器人的操控,使机器人愈加智能化。设备由主机和从机两部分组成,系统整体结构如图1所示。主机用于人体动作信息搜集,然后进行图画处理,辨认收支体动作,并担任把人体动作信息无线传送给从机。
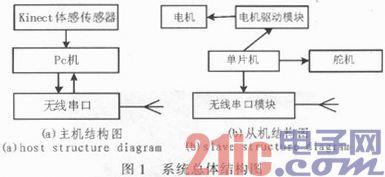
主机系统由PC机、Kinect体感传感器、XL02—232AP1无线传输模块组成。主机用于人体动作信息搜集,然后进行图画处理,辨认出人体动作,并担任把人体动作信息无线传送给从机。
从机则是一个动作履行机器人,它的操控系统由AVRatmega128单片机、无线传输模块、语音模块、BT37970B直流电机驱动模块等组成。它的机械结构主要由多自由度的手臂和四轮驱动的底盘构成。从机对信息进行实时处理,操控机器人手臂各个关节旋转相应的视点,然后完结相应的动作。
2 系统硬件规划
2.1 主机
1)Kinect体感传感器它是2010年由微软对XBOX360体感周边外设正式发布的姓名,具有动态捕捉,印象辨识,语音辨认等功用。依据该技能,能够运用手势在游戏中开车、与其他玩家互动、经过互联网与其他Xbox玩家共享图片和信息等,这也显现了它具有十分强壮的图画搜集与处理功用。
Kinect能够一起获取RGB和深度图画数据,支撑实时的全身的骨骼追寻,并能够识e一系列的动作。图2是它的外观图,左面镜头为红外线发射器,中心镜头是一般常见的RGB五颜六色摄像头,右边镜头是红外线CMOS摄像头所构成的3D深度传感器。微软在2011年6月推出的Kinect for Windows SDK Beta使开发人员能够直接获得间隔传感器、五颜六色摄像机以及四单元麦克风数组的原始数据流进行应用程序开发。此套SDK能够追寻Kinect视界内一位或两位用户的骨架映像,便于树立以体感操作的应用程序。
Kinect不同于一般摄像头的是,它有感知国际的CMOS红外传感器。该传感器经过是非光谱的办法来感知环境,纯黑代表无量远,纯白代表无量近,是非间的灰色地带对应物体到传感器的间隔。它搜集视界范围内的每一点,并构成一幅代表周围环境的景深图画。传感器以每秒30帧的速度生成深度图画流,实时3D地再现周围环境。
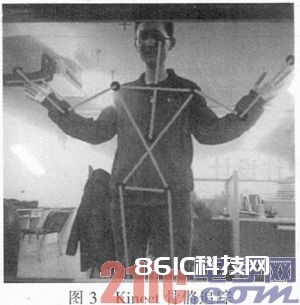
运用Kinect搜集到的深度图信息,能够得到一个20点的人体骨架结构,其二维投影如图3所示,远景切割与骨架提取该系统直接调用了SDK封装函数,得到人体20个节点的3维空间坐标以及节点方向信息,从而得到完好的人体骨架信息。
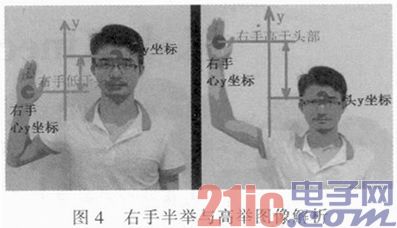
运用这些信息能够提取出人体姿势特征以及运动特征,用于人体根本动作的辨认。比如,经过比较右手与头部的Y轴坐标差值的阈值改变,能够解分出右手是否举起,如图4所示。
2)通讯模块XL02—232AP1无线模块是UART接口半双工无线传输模块,能够作业在433 MHz共用频段。其传输间隔约300 m,其作业电压+5 V,低功耗,能够与单片机I/O口直接相连,发射办法下串口速率为1.2~115.2 kbps,抗干扰才能强。衔接电路如图5所示。

2.2 从机
1)动作履行机器人
①手臂动作操控
本著作所运用的机器人有两种结构办法,分别是类人机器人和轮式机器人,不同点是一个是双足站立的,一个是轮式的,它们每条手臂均由4个舵机构成,经过操控每个舵机的旋转视点能够得到不同的手臂动作和腿部动作,每8个舵机视点数据对应于一个特定的手臂动作。能够将每个手臂动刁难应的8个舵机视点封装在一个结构体数组中,需求时能够直接调用。类人机器人的腿部动作的操控也是如此。
机器人手臂动作的履行有两种办法:依据从上位机传来的动作指令,做出对应的预先设定的一套动作;对人体的当时动作进行实时仿照,人体的动作信息解分出来后,在上位机中核算山对应的各个视点数据,然后将这些视点数据经过无线传输单元实时地传送到机器人,机器人做出呼应,仿照当时人体手臂动作。
②机器人平面运动操控
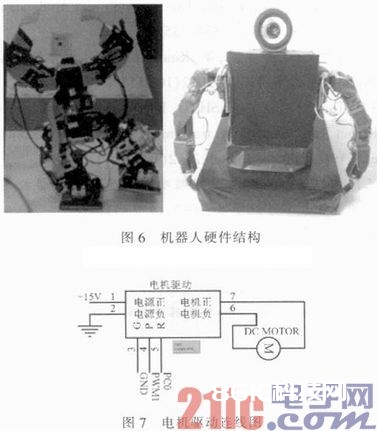
机器人平面运动的操控针对的是轮式机器人,机器人的平面运动办法大致有4种,分别是行进,撤退,左转,右转。这4种运动办法对应于4个指令数据,也一起对应着4个操作者的手势动作。经过实在的开车旋转方向盘来操控机器车的旋转,经过右手相对于左手的超前或落后来操控车的行进和撤退,解分出这4个动作后,只需发送对应的4个指令数据即可。机器人硬件结构如图6所示。
2)通讯模块 同主机。
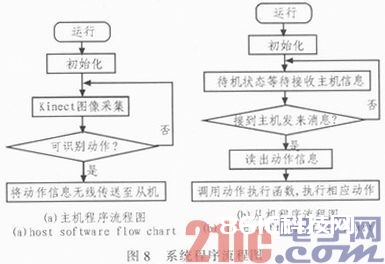
3)电机驱动模块BT37970B直流电机驱动,这是一款H桥有刷直流电机驱动模块,适用3~24 V的大功率直流电机,DC 10~29 V输入直流电压。在25 V电压下,额外继续输出10 A电流,适用于锂电池直接供电。供电为25 V 10 A时测得芯片作业频率高达1 MHz,驱动才能有了显着的进步,呼应速度快。两路PWM输入,占空比能够在0~100%,是一般驱动所达不到的。具有瞬间制动才能以及做到全程速度准确操控。适用于锂电池直接供电驱动的机器人或车模竞赛。操控办法简略,仅需求接3根输入线即可操控电机制动及正回转,其间GND引脚与单片机的GND相连,P引脚接单片机的PWM输出引脚,R引脚接单片机的PC0引脚,用于对电机滚动方向的操控。衔接图如图7所示。
4)语音模块最大输出功率为25W,具有30M存储容量,能够经过8个按键触发8段语音,也能够经过RS485/232给模块指令触发220段语音。
5)电源部分选用的是3S锂电池,容量为1500 mAh,额外电压11.1 V,35C超大放电才能。
3 系统软件规划
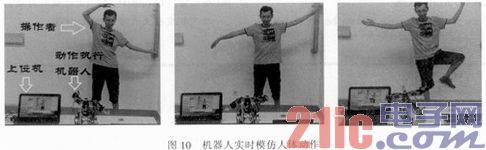
软件规划选用模块化处理办法,主机程序主要由主程序、Kinect初始化、图画辨识、语音识e、串口通讯等模块组成,选用C#编写,编译环境为VS2010,运用部分环境库函数。从机程序主要有主程序、串口通讯、电机驱动、舵机驱动、动作函数等模块组成。选用C言语编写,编泽环境为Avrstudi04,运用部分环境库函数。系统程序流程如图8所示。
Kinect将搜集到的图画信息传送给上位机,上位机经过图画处理后辨认出人体动作,并将处理后的成果输出,如图9所示。机器人实时仿照人体动作测验状况如图10所示。

4 定论
操作者能够站在离Kinect体感传感器3 m左右的间隔对机器人进行体感操控。现在该机器人能够实时仿照左、右手各6个简略的动作:高举、半举、乎举、拥抱、架起、放下。以及实时仿照单腿抬起动作。你还能够经过双手模仿方向盘实时操控机器车的前后左右运动,亦可经过语音forward、back、turn left、turn right宋操控机器人的前后左右运动。
机器人在人们牛活中承担着越来越重要的效果,该系统则供给了一种新的操控办法——体感操控,使机器人的操控愈加灵活多样,完结了愈加天然的人机交互,具有较高的理论研究价值和先进性。一起,经过手势实时操控机器人的办法,能应用于排爆、救援、医疗等许多职业,具有宽广的市场远景。在此基础上能够依据工业生产等需求,研宣布更多品种的自动化机器人,为创立自动化机器人系统供给活跃的支撑和协助。





