


摘要:以用于显微打针的显微试验操作体系为渠道,规划了一种依据STM32的嵌入式低功耗无线手持操控器。操控器是试验渠道的人机接口,代替了渠道已有的有线操控器,在原设备基础上添加了无线通讯功用和渠道作业状况及参数实时显现功用,弥补了原设备连线杂乱、无数据显现功用等许多缺乏。针对体系需求,完结了无线手持操控器的软硬件规划。测验结果表明:无线手持操控器具有功耗低,无线通讯牢靠安稳,用户界面友爱简练的特色,提高了显微试验的功率和质量,具有较高的实用价值。
显微打针技能是现代生物工程重要的技能手段之一,广泛使用在转基因、试管婴儿和克隆等细胞工程范畴。显微试验操作体系是一套完好的用于显微打针试验的自动化设备,它将自动操控、微电子、嵌入式、无线通讯等技能运用到显微打针试验中,经过手持操控器和机械手驱动体系完成了显微打针试验的数字化和智能化,比较于传统人工操作,极大的提高了科研作业者的作业功率和作业质量。
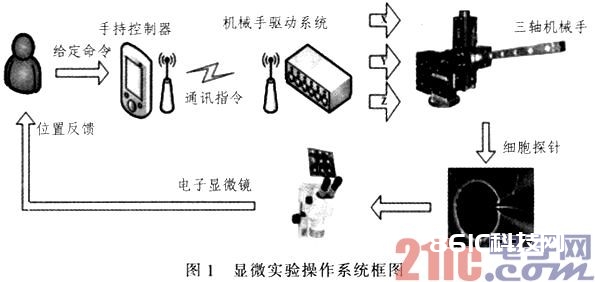
手持操控器是显微试验体系的人机接口,用户经过手持操控器将指令发送至机械手驱动体系,由驱动体系操控三轴机械手完成对细胞探针的操作。原试验体系中的手持操控器选用RS485与驱动体系完成通讯,运用时需求操作人员衔接供电线缆及通讯线缆,过多的连线不只使得手持操控器丧失了其运用的便携性,而且接插件简略松脱为体系添加不牢靠危险。本文规划了一种选用锂电池电池供电的无线手持操控器,弥补了上述缺乏,除此之外还添加了LCD显现功用,完成了机械手作业参数和状况的实时监控,进一步提高了显微试验的自动化程度。
1 无线手持操控器需求剖析
选用无线手持操控器的显微试验操作体系框图如图1所示,依据体系框图需求可将无线手持操控器功用分为人机接口、板间通讯、锂电池办理3部分。
1.1 人机接口
原始的有线操控器不具备参数显现功用,机械手作业参数和状况无法获取,特别是XYZ坐标只能经过显微镜大致判别,运用时非常不便利。经过添加LCD显现功用弥补了上述不
足,使得手持操控器成为功用完好的人接机口。用户可经过按键(确认、撤销、移动等)完成参数查询与设置、界面切换等操作。
操控器经过三路光电编码器完成对机械手XYZ三轴运动的操控,用户滚动编码器的方向和速度决议了机械手在相应坐标轴上运动的速度和方向。
1.2 板间通讯
操控器经过无线方法和驱动体系完成通讯。通讯应当牢靠,丢包、误码、重传都会导致用户指令不能及时传送至驱动体系,机械手因而无法及时呼应,然后显微试验所需的高分辨率就难以确保,严峻时还会损坏细胞乃至损坏机械手。别的操控器还保留了RS485有线通讯接口备用。正常运用时,有线和无线通讯间隔均不超越2 m,运用环境无强电磁搅扰。
1.3 锂电池办理
无线手持操控器选用3.7 V/2200 mAh锂电池供电,比较于传统的镍镉电池、镍氨电池、铅酸电池,锂电池具有相同容量下体积小、质量轻;无重金属元素,对环境污染小等优势,可是锂电池对过充电和过放电非常灵敏,过充和过放都会对电池形成不可逆的损坏,下降电池寿数,因而需求对锂电池进行合理的办理和维护。
2 无线手持操控器硬件规划
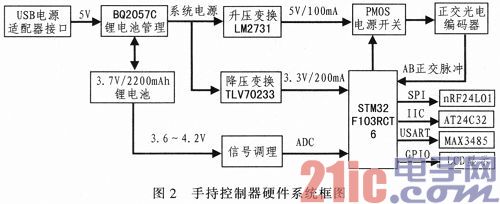
依据无线手持操控器的功用需求,规划出手持操控器硬件体系框图如图2所示。下面临体系中各重要模块进行阐明。
2.1 MCU模块
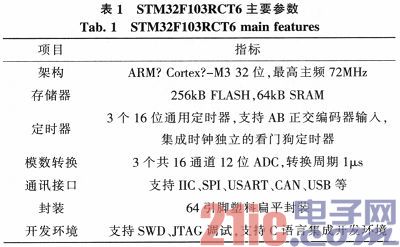
MCU选用STM32F103RCT6,该芯片是专为高性能、低本钱、低功耗的嵌入式使用所规划的,其主要参数如表1所示。该芯片处理速度快,并集成了多种功用丰厚的外设资源,极大的简化了体系硬件规划,如体系中运用到的通讯接口如:IIC、SPI、USART以及用于电池电压检测的ADC都集成在MCU中,省去了外接相应功用的芯片。别的光电编码器输出的AB正交脉冲可直接接入MCU,内部的定时器可完成判向、可逆计数、颤动滤波等功用,避免了较为杂乱的正交编码器的接口电路。简练的硬件规划,下降了本钱,提高了牢靠性。
2.2 无线通讯模块
无线收发芯片挑选瑞典NORD%&&&&&%公司出产的nRF24L01。该芯片作业于2.4~2.5 GHz频段,该频段是全球敞开的ISM(工业、科学和医学)频段,运用者无需请求许可证,给开发者带来了很大便利。该芯片内集成了增强型“ShockBurst”形式操控器、频率发生器、功率放大器、晶体振荡器、调制器和解调器,MCU经过SPI接口可以对芯片进行灵敏的装备。
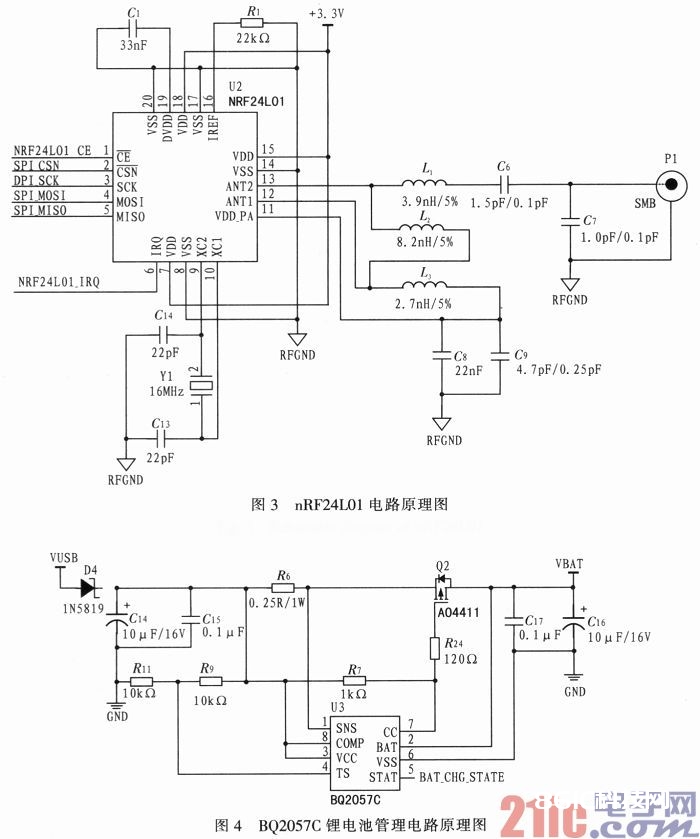
比较于蓝牙、WiFi、ZigBee等其他短间隔无线通讯方法,nRF24L01具有功耗低、开发简略、本钱低一级优势,特别是在低功耗方面非常合适本操控器的需求,发射功率为0dBm时电流耗费为11.3 mA,接纳形式下电流耗费为12.3 mA,待机形式下电流耗费为22μA,无论是收发形式仍是待机形式,电流耗费都远低于上述其他无线通讯方法。无线通讯模块电路原理图如图3所示。
2.3 锂电池办理
BQ2057C是美国TI公司出产的先进锂电池充电办理芯片,该芯片集成了电压电流调节器、电池温度监测、充电状况指示等多种功用,外围电路简练,非常合适本体系的使用需求,电路如图4所示。
3 无线手持操控器软件规划
手持操控器的软件开发选用C言语Keil MDK集成开发环境,它集编码、编译、仿真、下载、调试功用于一体,极大提高了软件开发功率。
依据操控器的功用将软件划分为如下六使命:体系初始化、电源办理、指令处理、nRF24L01收发、LCD显现、键盘扫描,如图5所示。





