


在高功能的电机操控运用中,咱们一般用到磁场定向技能(FOC)。这个方法的原理比较直观,首要是将三相定子电流经过坐标改换,分解为转矩重量和励磁重量,然后别离操控。这一算法涉及到以下过程:
1. 运用Clarke 和Park 改换,将编码器的3 相反馈电流输入和转子方位转换为正交和直流电流重量。
2. 运用这些电流重量作为两个并行运转的份额和积分(PI) 操控器的输入,将直流电流限制为零,把正交电流保持在所需的扭矩水平上。
3. 经过Clarke 和Park 反改换,将PI 操控器的直接和正交电流输出转换回3 相电流。其原理如图1所示。

FOC的基本原理在从事电机操控的开发人员中可谓众所周知,可是真实可以把其功能发挥好却并不简单,首要的几个问题是:
1) 采样的问题:包含电流的采样精度、编码器的分辨率和核算延时等。
2) 调节器的规划与调谐,假如不清楚电机的参数则很难进行,现在很大程度上仍然是选用试凑的方法,费时吃力,并且简单遭到电机参数漂移的影响。
3) 电机磁链的核算问题:不管是定子的,转子的仍是气隙的,假如磁链核算的不精确,则整个FOC定向的根底,即定向视点都会发生误差,严重影响功能。
针对以上问题,TI在C2000系列DSC上面(现在支撑TMS320F2806xF系列,包含(80和100管脚的69F, 68F和 62F)提出了InstaSPIN 电机解决方案,在此对其进行一下技能上的解析,期望起到抛砖引玉的效果。
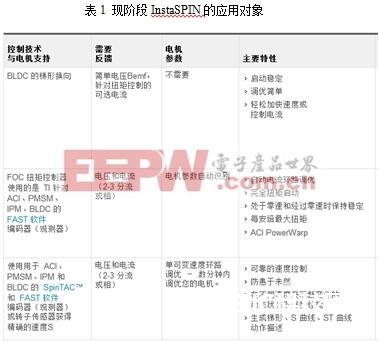
现在现已开发好的InstaSPIN算法首要面向3个运用场合,如表1所示。
其完成的具体方法是,在操控器的ROM中,嵌入了TI自己开发的FASTTM技能。这一技能自身的原理比较复杂,可是在用户端来看,咱们面临的首要是一些寄存器,包含操控寄存器、数据寄存器等,只需正确操控相应的寄存器就可以正确发挥它的功能了。FASTTM技能首要包含以下方面:






