


操控回路的许多根据MCU的规划进行最底子的使命之一。一般,这些规划未能采纳的主要特点和现代MCU的外设供给给最充沛运用有用地完结闭环操控体系。守时器和中止操控器一般用在这些体系中,但一些其他功用,如DMA,先进的模仿 – 数字转化器,以及专用数学函数来完结操控体系时,屡次忽视。
本文将很快回忆一些高效的根据MCU的闭环操控体系的要害要求。为进步功率的常用技能将运用一些比如的MCU来阐明。一旦你了解了一些进步功率,你能够更好地寻觅,这将优化封闭你的下一个操控环路的规划完结一起的技能。
操控环路的基本知识
操控回路操控动力体系运用的要害要素。动态体系能够是任何机械或电气体系,其具有输入和输出之间的联系(一般建模为线性联系)。输出一般需求以这样的办法,以留在期望的操作“带”进行操控。例如,在主动巡航操控的车内是这样的体系,其间轿车的速度被设定在所需的水平缓操控器坚持速度稳定即便轿车遇到的小山。操控该速度的算法运用适用的输入(在加速器中的压力)的操控回路,丈量的成果(速度),并调整,以坚持该速度在所需水平的输入。一个简略的单输入单输出操控体系,具有一操控环的框图,示出鄙人面的图1。
一个简略的动态操控体系操控回路框图
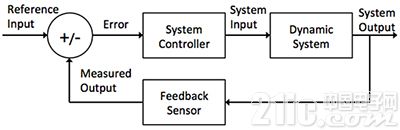
图1:一个简略的动态操控体系的操控回路的框图。
别的,在上述程序框图中输入到动态体系得到的输出。的输出由反应传感器丈量和测得的输出与参阅(期望)的输入。假如是有差异的,所运用的体系操控器所发生的差错来修正体系的输入,使体系输出更挨近基准输入。体系操控器需求满足的智能,以防止振动和或许导致的不正确的办理操控体系中的其他问题。假定动态体系是线性的(其间输出是正比于输入)不为限制性,由于你或许会以为由于许多机电体系并操作以线性办法,或许能够很简略地“倾向”内的操作一个更杂乱的传递函数的线性区域。
用微操控器完结操控环路
这是很简略了解为什么MCU是主力完结操控体系。与感测,核算和操控各种输入和输出,一切在十分高的功用率的才能(特别是在高功用的速率相关于机械体系,如电机)MCU是一种天然的操控元件。除了CPU的才能,许多微操控器供给智能外设使封闭您的操控回路简略,高效。
操控回路一般有动力体系的每次调整之间的时刻联系。这种“循环时刻”决议了调整的速度有多快能够做。假如循环时刻过长在联系到体系动力学(受控体系的时变性质)这将是困难的,假如不是不或许有用地操控该体系的输出。振动与“失控”的过错能够累积,使体系在失利的风险,或许在一个十分戏剧性的性质。在一般情况下,更快的MCU可封闭循环(处理输出传感器,确认任何参阅差错,并调整体系输入),就更好了。
有用的计时,计数因而需求优化封闭操控环路和MCU具有先进的守时外设能够最佳地完结操控回路的要害功用。例如,Silicon Labs的EFM32LG360F64G-E-CSP81 MCU有一个守时器/计数器外围有几个特点在操控环路的完结是有用的。常常守时和都需求在除了闭环操控器的主循环守时器功用计数。让咱们来看看EFM32LG计数器/守时器外设更具体(图2)的方框图,看看它怎么协助完结图1所示的操控回路体系中的其他常用功用。
Silicon Labs公司EFM32LG单片机的守时器/计数器框图

图2:Silicon Labs公司EFM32LG单片机的守时器/计数器框图(Silicon Labs公司供给)。
在T / C中的一个有用的特点是,经过在TIMn_CCn销上图的左边计数从外部来历搬运的才能。观察到发生根据动态体系的测得的输出跃迁传感器时,这些输入能够是有协助的。例如,根据方位丈量旋转丈量常常发生对每一圈的过渡。还要留意存在这样能够用于相似丈量的图的上部中心的正交解码器块。计数的数目记载的,当他们抵达存储在Timern_TOP终端值能够用于触发中止当即采纳举动或许能够存储以备将来处理。
守时器/计数器输出,TIMn_CCn销的右侧图中,能够运用脉冲宽度调制(PWM)计划一起用于操控输入到动态体系。这些体系中的时刻的信号是有用的触及用于操控所期望的电压或电流电平。准确地操控信号周期,信号为高电平时,边际过渡点都是至关重要的,而且能够在守时器/计数器的PWM功用,有用地操控。具有三个独立的PWM输出也方便了通用电机操控运用,其间三个别离绕组用于改动带有纺丝电机相关联的磁场。
智能外设操控
完结快速,高效的闭环反应的时分常常需求运用的智能外设,从高功耗CPU和程序存储器块卸载处理。假如外围设备能够从CPU独登时进行操作,这能够让CPU履行其它更杂乱的处理使命或乃至在低功率状况,以等候,直到处理是必需的。一些先进的微操控器具有能够运用的外围设备衔接在一起,使没有来自CPU干涉要求装备自主操作的特别的外围操控体系。例如,瑞萨MCU R5F52108CDFM的RX210 MCU组的成员,有一个事情链路操控器(ELC),用于衔接和操控外围设备输出到外设投入自主操作。在ELC的框图显现鄙人面的图3。
瑞萨RX210群单片机事情链路操控器框图
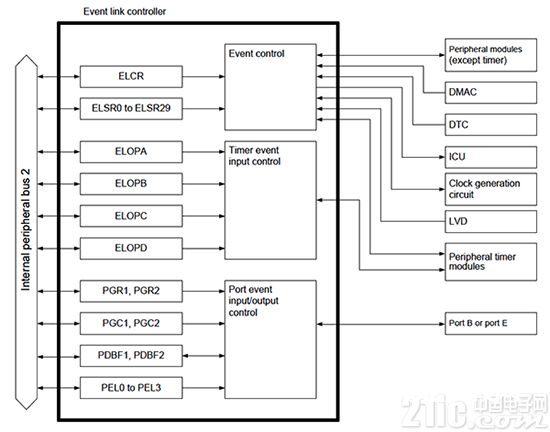
图3:瑞萨RX210群单片机事情链路操控器框图(瑞萨供给)。
内部外围总线,在图的左边,用于互连的外围设备,在右侧的图所示。一切的外设,包含DMA操控器,数据传送操控器(DTC),和中止操控器单元(ICU)能够用专门的操控,以自主发动根据中止的外设衔接,守时器比较的成果,或电平改变。多达59种的事情信号,能够衔接到外设发动转化,发动计时器,并开端DMA或DTC传送或任何其他所需的外围设备。当已设定作为触发事情发生时,发动所挑选的模块的动作集。
多个操作的链能够发动,这样杂乱的操作,无需CPU干涉来完结。例如,一个计时器能够建议一个模仿 – 数字转化,并存储在存储器中的转化后的值。计数器能够坚持的转化次数的轨迹,当计数指示一个完好的数据集可进行处理的CPU或许被中止。时钟振动器能够被CPU处理过程中,并主动完结切换到更快的形式。经过运用ELC以最充沛,许多在公共操控环路所需的感测功用能够十分迅速地完结,有用地使其易于完结快速循环时刻,一起坚持功率降至最低。
高效的核算
正如咱们所看到的,运用智能和自主计数器/守时器和外设能够改进循环时刻,下降功耗 – 无论是在操控体系规划的重要方面。一般情况下,核算是需求在每个主操控体系块来处理检测时,比较,操控和操作被操控的体系所需求的数据。实际上,核算要求显着地添加作为操控体系的功率,精度和长的运转寿数已成为重要的体系要求。先进的算法用于完结操控回路现在运用的当地,往往需求添加精度浮点核算份额积分微分算法。假如高档核算中不支持的硬件,操控环路闭合,在所需的频率变得十分难以完结。
MCU厂家了解需求先进的处理才能,并已包含数字处理才能,即便在低端的MCU,能够加速所需杂乱的核算闭环操控规划。高端微操控器一般包含专用硬件来加速所需的最准确操控运用程序的浮点核算。飞思卡尔的Kinetis K60 MK61FN1M0VMD15 MK61FN1M0VM类的MCU选用32位ARM Cortex-M处理器与DSP指令和单精度浮点运算单元,以加速所需的最杂乱的操控算法,先进的核算。 DSP的指令包含用于快速处理的较低分辨率的信号扩展进行快速处理的高精度信号,而且单指令多数据(SIMD)指令的单周期多累加(MAC)指令。硬件除法模块,在短短2至12个周期运转,加速一般缩放操作。
关于乃至更高的功用,一个双核CPU能够运用,以便处理使命能够并行进行。例如,德州仪器协奏曲微操控器,如F28M35H52,一起具有ARM Cortex-M3的32位CPU和德州仪器的TMS320C28x 32位CPU浮点功用。这款双核微操控器的框图如下图4。
德州仪器的框图F28M35x协奏曲MCU(点击检查全尺度)
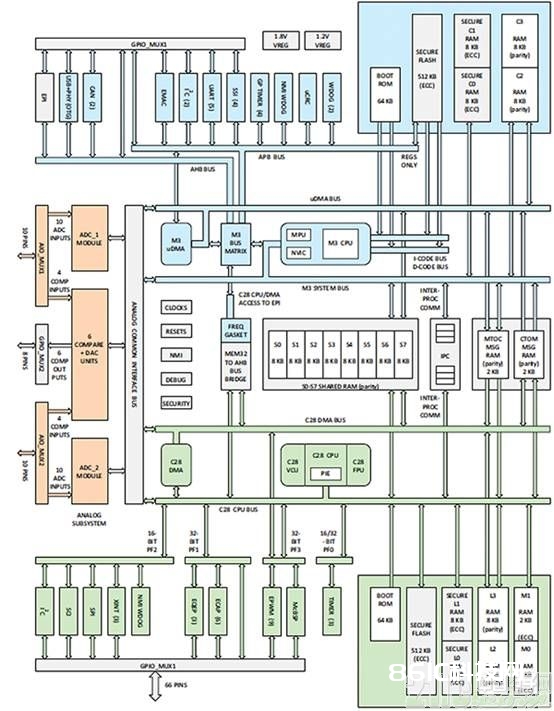
图4:德州仪器F28M35x协奏曲MCU框图(德州仪器供给)。
根据ARM的MCU,在该图的上部,可用于办理外设在协奏曲CPU能够被用于处理数据和操控办理体系。请留意,PWM守时器是紧密联系在一起的协奏曲子体系因而很简略发生被输入到操控体系所需的杂乱波形。这种类型的双核CPU之间的专业化或许是重要的寻觅,当你的运用程序易于别离算法。假如你仅仅需求更多的处理才能为一个单一的算法或要求双CPU步调一致运转的牢靠性更高,均匀的双CPU,具有相同的处理子体系,如德州仪器大力神令吉的ARM Cortex-R4 MCU或许是更好的挑选。闭环操控体系用于高牢靠性运用程序能够运用的非均相双CPU履行的内置冗余一种更有用和牢靠的规划。
定论
有用地封闭您的操控环在根据MCU的规划纷歧定是充满了审判和过错的办法寻觅最佳的完结。运用现代MCU的一切先进功用正常能够协助您创立更高效,更快速更体系的办法,更低的功耗和更具本钱效益的操控体系解决计划。






