


服务机器人在家庭住所、酒店客房、作业空间、会所等室内空间运用时,都要用到避障传感器,一般选用红外、超声波、激光雷达、双目视觉四种传感器中的一种或多种进行避障操作,本文将首要剖析红外避障传感器的装置方位。
红外避障传感器根本原理:运用物体的反射性质。在必定规模内,假如没有妨碍物,发射出去的红外线,因为传达间隔越远而逐步削弱,最终消失。假如有妨碍物,红外线遇到妨碍物,被反射抵达传感器接纳头。传感器检测到这一信号,就可以承认正前方有妨碍物,并送给单片机,单片机进行一系列的处理剖析,和谐服务机器人的两轮作业,完结逃避妨碍物动作。
红外避障传感器是专为轮式机器人规划的一款间隔可调式避障传感器。其具有一对红外线发射与接纳管,发射管发射出必定频率的红外线,当检测方向遇到妨碍物(反射面)时,红外线反射回来被接纳管接纳,此刻指示灯亮起,经过电路处理后,信号输出接口输出数字信号,可经过电位器旋钮调理检测间隔,有用间隔2~40cm,作业电压为3.3V-5V,因为作业电压规模广泛,在电源电压动摇比较大的状况下仍能安稳作业,适宜多种单片机、Arduino控制器、树莓派运用,装置到机器人上即可感测周围环境的改变。

一种典型的红外壁障传感器
红外避障传感器作业原理:赤色线接5V,黄色接信号,绿色GND 接电源负极或单片机上的逻辑地。前方无妨碍输出高电平,有妨碍输出口(黄色)电平会从高电平变成低电平(0)。反面图有一个电位器可以调理妨碍的检测间隔。在电路规划中可以再输出端黄线加上拉电阻10K到5V,再接入单片机检测,会比较安稳,单片机检测可以选用外部硬件中止INT0 INT1等来完成。
当时在服务机器人本体上装置的红外避障传感器经过依照高中低三组进行装置,如最常见的装置高度为低位80mm,中位480mm,高位780mm。这一装置高度的设定并没有充沛的规范和依据,在实践使用中呈现了许多状况红外避障传感器因为装置太高、太低或密度不行导致无法探知到邻近妨碍物,然后影响服务机器人的举动并对或许会环境和人形成损坏,这都是红外避障传感器装置办法不恰当形成的,急需依据环境特征特别妨碍物特色研讨更适宜的红外避障传感器的布置计划。
广州零号软件科技有限公司(机器人零号)在健康养老服务机器人的研制过程中,进行了很多的实景丈量和场景模仿,根本总结出住所等室内空间内服务机器人所需的红外传感器装置高度,这些经历也用在哈士奇健康服务机器人本体上。
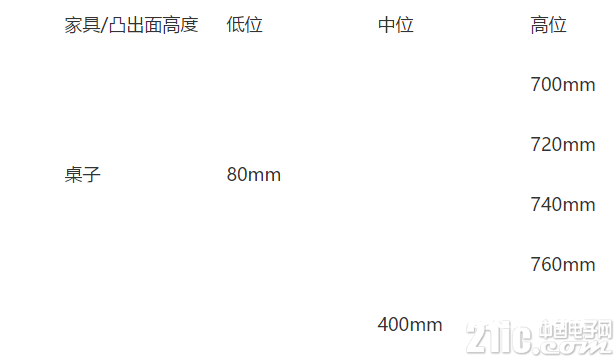
咱们在研制中,依据家具规划相关的国家规范和规范,收拾和总结常见的家具的高度,特别剖析家具凸出物如桌边、椅面和靠背、茶几边、沙发扶手和靠背、床边,因为这些在笔直面上超出底部和凸出部位是最简单给服务机器人移动带来妨碍的。以下是有关家具的高度的尺度阐明:
1、桌类家具高度尺度规范可以有700mm、720mm、740mm、760mm四个标准;
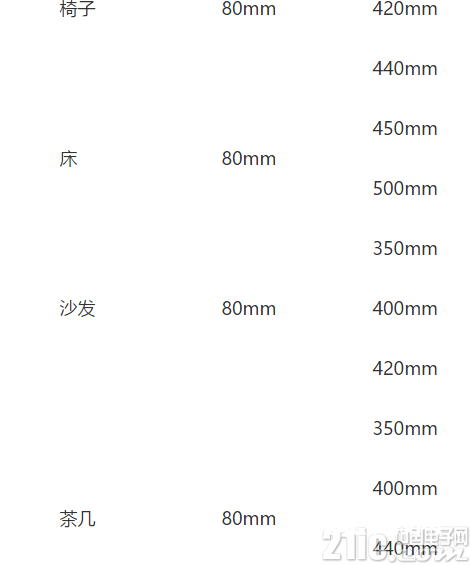
2 椅凳类家具的座面高度可以有400mm、420mm、440mm三个标准。
3 床沿一般来说床沿高度以45厘米为宜;褥面距地上高度来测算,规范是46~50厘米;
4 沙发的一般座高:350-420mm;扶手高560-600mm;单人式背高:700-900mm。
5、茶几:高度为350-500mm。
在室内的其它家具,包含柜子、箱子、书架等都在笔直面上根本保持共同没有显着的凸出部位,所以服务机器人红外传感器在任何高度丈量到的间隔都是共同的,只需任何高度的一个红外传感器取得数据就可以代表感知到这一妨碍物,所以,这类具有平坦立面的家具不必考虑红外避障传感器的新的装置办法。
家电,特别是或许呈现在服务机器人移动途径附件的一些家电,如冰箱、洗衣机、饮水机等,也具有平坦的立面,所以也不必考虑虑红外避障传感器的新的装置办法。
因为家具的桌面板材厚度有16mm、18mm、25mm等三个首要尺度,茶几的钢化玻璃的厚度为10mm以上,一般12mm。因而,我是从家具外表(家具高度最高点)向下10mm规模是可以触碰到家具的凸出头的,这也就可以成为服务机器人红外避障传感器装置高度的重要依据。
依据家具的特征,咱们收拾出关于服务机器人举动比较灵敏的一些高度:
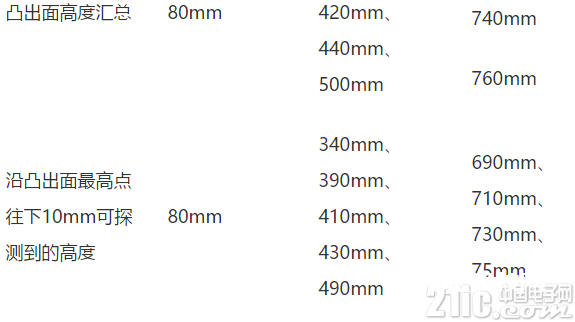
因而,从上表可取得服务机器人装置红外避妨碍服务机器人的低位、中位、高位。有了装置的高度,还需求进一步规划红外避妨碍传感器的布局。
为了取得最佳的避障作用,咱们总共选用24个红外避障传感器,其间正面装置12个,两个旁边面每个旁边面装置3个合计6个,后边装置6个。
低位的红外避障传感器在80mm高度散布装置,其间正面布置2个,两个旁边面每个旁边面1个,反面2个。
中位的红外避障传感器在五个不同高度散布装置,分别是340mm、390mm、420mm、430mm、490mm。其间正面要求有五个红外避障传感器在五个高度悉数布置装置,旁边面装置一个红外避障传感器,高度为420mm;反面装置三个红外避障传感器,高度分别为340mm、390mm、420mm。
高位的红外避障传感器在四个不同高度散布装置,分别是690mm、720mm、730mm、750mm。其间正面要求有四个红外避障传感器在四个高度悉数布置装置,旁边面装置一个红外避障传感器,高度为720mm;反面装置两个红外避障传感器,高度分别为690mm、730mm。
在本事例中,红外避障传感器选用NPN型光电开关;输出状况是0、1,即数字电路中的高电平和低电平,检测到方针是低电平输出,正常状况是高电平输出,输出外加一个1K左右的上拉电阻即可连接到单片机IO口上。因为规划了24个红外避障传感器,因而,对应需求单片机IO数量为24个。
这种装置方位与装置办法,相关于现有的红外避障感器的装置办法进行了重要改善:针对家具凸出物高度进行的装置方位优化,选用了低中高三个装置区域共24组红外避障传感器,散布装置在服务机器人的前面、两边和后边。让红外避障传感器总能扫描到家具凸出头,然后让服务机器人可以进行有用躲避各类家具,适用于家庭服务机器人、商用服务机器人、送餐机器人等各类服务机器人。






