


规划了根据COMX和STM32的机器人伺服操控器解决方案。首要介绍了COMX模块的功用及结构,然后规划了根据FSMC的接口电路来操控COMX。体系选用实时工业以太网EtherCAT协议作为机器人伺服体系的底层协议,一起构建伺遵守站操控器。实时以太网技能简化了一般总线的互操作性和实时性等方面的问题,能满意操控网络传输的实时性要求,EtherCAT工业以太网技能以其网络实时性高、速度快、拓扑结构灵敏等长处得到广泛重视。本操控器选用德国赫优讯公司开发的嵌入式实时以太网模块COMX来完结EtherCAT通讯的功用,选用STM32为主操控器,由STM32来操控电机和COMX的作业流程。
硬件电路模块
本伺服操控器首要用于机器人伺服节点通讯、关节电机的操控、I/O操控以及传感信息的收集。首要硬件由COMX和STM32来组成,其间COMX担任EtherCAT通讯,STM32选用FSMC机制来读写COMX;STM32是从站的伺服操控器主控芯片,首要进行电机操控和A/D、D/A模块的操控,以及担任办理COMX模块的运转流程。其间伺服通讯功用是根据EtherCAT协议进行组网来到达各模块互联和数据交换的意图,这样便于伺服节点的扩展和硬件结构的规划;在电机操控上选用RS485接口操控SR518数字舵机;其间I/O口用于根本的输入输出功用;A/D通道能够衔接传感设备用于机器人的感知,D/A通道用于对语音、电流等模拟量的输出;RS232是开发过程中的调试接口。
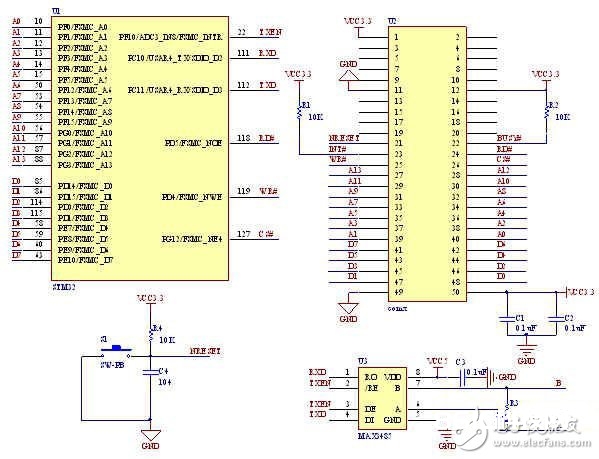
图3.硬件电路图
STM32选用FSMC机制操控COMX,将COMX映射到STM32的内存空间中,对COMX的读写方法和读写SRAM相同。 FSMC是集成在STM32F系列芯片上的外部存储器操控接口,FSMC能操控两种存储器: NOR Flash/SRAM操控器、 NAND Flash/PC卡操控器。嵌入式模块COMX经过一个50PIN插槽来衔接主控芯片,插槽包含了与主机通讯必备的操控线总线、16位数据总线和14位地址总线等;COMX与STM32的硬件电路图如图3所示,由电路图可知COMX内存映射到FSMC的第一个存储块的第四个分区中,开始地址为 0x6C000000,而且选用8位数据宽度来读写DPM存储区。






