


步进电机是将电脉冲信号转变为角位移或线位移的开环操控电机,是现代数字程序操控体系中的首要履行元件,运用极为广泛。在非超载的状况下,电机的转速、中止的方位只取决于脉冲信号的频率和脉冲数,而不受负载改动的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向滚动一个固定的视点,称为“步距角”,它的旋转是以固定的视点一步一步运转的。可以经过操控脉冲个数来操控角位移量,然后到达准确定位的意图;一起可以经过操控脉冲频率来操控电机滚动的速度和加速度,然后到达调速的意图。

步进电机的功用模块规划
本模块可分为如下3个部分:
· 单片机体系:操控步进电动机;
· 外围电路:PIC单片机和步进电动机的接口电路;
· P%&&&&&%程序:编写单片机操控步进电功机的接口程序,完成三角波信号的输出功用。
(1)步进电动机与单片机的接口
单片机是功用极佳的操控处理器,在操控步进电机作业时,接口部件有必要要有下列功用。
①电压阻隔功用。
单片机作业在5V,而步进电机是作业在几十V,乃至更高。一旦步进电机的电压串到单片机中,就会损坏单片机;步进电机的信号会搅扰单片机,也或许导致体系作业失误,因而接口器材有必要有阻隔功用。
②信息传递功用。
接口部件应可以把单片机的操控信息传递给步进电机回路,发生作业所需的操控信息,对应于不同的作业办法,接口部件应能发生相应的作业操控波形。
③发生所需的不同频率。
为了使步进电机以不同的速度作业,以习惯不同的意图,接口部件应能发生不同的作业频率。
(2)电压阻隔接口
电压阻隔接口专用于阻隔低压部分的单片机和高压部分的步进电机驱动电路,以保证它们的正常作业。
电压阻隔接口可以用脉冲变压器或光电阻隔器,基本上是选用光电阻隔器。单片机输出信号可以经过TTL门电路或许直接送到晶体管的基极,再由晶体管驱动光电耦合器材的发光二极管。
发光二极管的光照到光电耦合器材内部的光敏管上,转换成电信号,再去驱动步进电机的功率扩大电路,电流扩大接口是步进电机功放电路的前置扩大电路。它的作用是把光电阻隔器的输出信号进行电流扩大,以便向功放电路供给足够大的驱动电流。
(3)作业办法接口和频率发生器
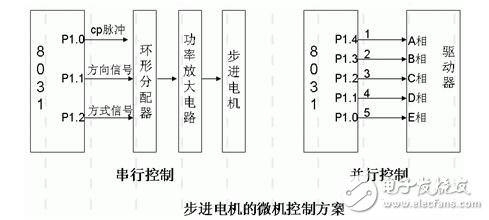
用单片机操控步进电动机,需求在输入输出接口上用3条I/0线对步进电动机进行操控,这时,单片机用I/O口的RA0、RAI、RA2操控步进电动机的三相。
步进电机的操控
步进电机的开环操控
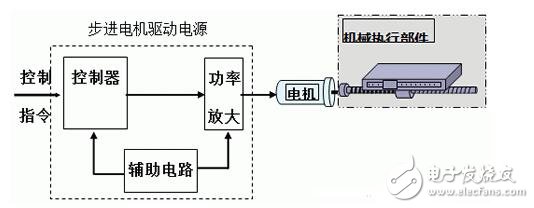
1、步进电机的硬件操控
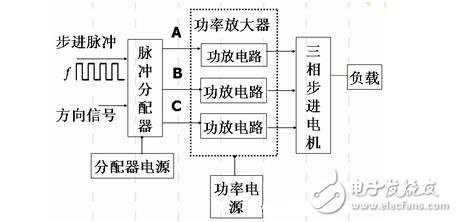
(1)脉冲分配器
当方向电平为低时,脉冲分配器的输出按A-B-C的次序循环发生脉冲。
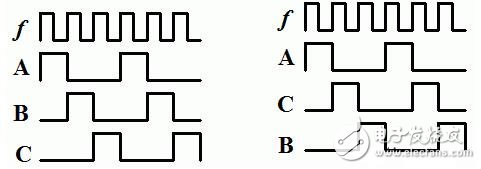
当方向电平为高时,脉冲分配器的输出按A-C-B的次序循环发生脉冲。
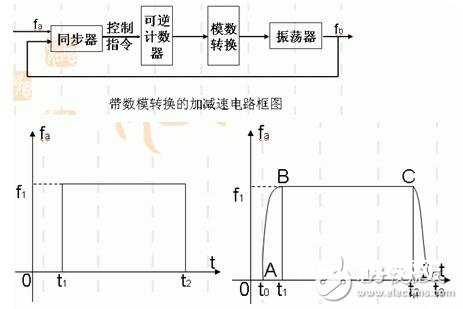
(2)加、减速操控:
(3)功率扩大器
将脉冲分配器的输出信号进行电流扩大后给电动机的定子绕组供电,使电动机的转子发生输出转矩。
2.步进电机的微机操控:
现在,伺服体系的数字操控大都是选用硬件与软件相结合的操控办法,其间软件操控办法一般是运用微机完成的。这是因为依据微机完成的数字伺服操控器与模仿伺服操控器比较,具有下列长处:
(1)能显着地下降操控器硬件本钱。速度更快、功用更新的新一代微处理机不断涌现,硬件费用会变得很廉价。体积小、重量轻、耗能少是它们的一起长处。
(2)可显着改进操控的可靠性。集成电路和大规模%&&&&&%的均匀无故障时(MTBF)大大善于分立元件电子电路。
(3)数字电路温度漂移小,也不存在参数的影响,安稳性好。
(4)硬件电路易标准化。在电路集成进程中选用了一些屏蔽办法,可以防止电力电子电路中过大的瞬态电流、电压引起的电磁搅扰问题,因而可靠性比较高。
(5)选用微处理机的数字操控,使信息的双向传递才能大大增强,简略和上位体系机联运,可随时改动操控参数。
(6)可以规划适合于许多电力电子体系的一致硬件电路,其间软件可以模块化规划,组装构成适用于各种运用目标的操控算法;以满意不同的用处。软件模块可以便利地添加、更改、删减,或许当实践体系改动时完全更新。
(7)进步了信息存贮、监控、确诊以及分级操控的才能,使伺服体系更趋于智能化。
(8)跟着微机芯片运算速度和存贮器容量的不断进步,功用优异但算法杂乱的操控战略有了完成的根底。
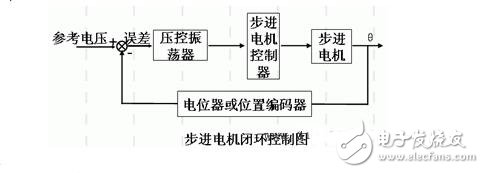
步进电机的闭环操控
步进电机的操控战略
1 PID 操控
PID 操控作为一种简略而有用的操控办法 , 在步进电机驱动中取得了广泛的运用。它依据给定值 r( t) 与实践输出值 c(t) 构成操控差错 e( t) , 将差错的份额 、积分和微分经过线性组合构成操控量 ,对被控目标进行操控 。文献将集成方位传感器用于二相混合式步进电机中 ,以方位检测器和矢量操控为根底 ,规划出了一个可主动调理的 PI 速度操控器 ,此操控器在变工况的条件下能供给令人满意的瞬态特性 。文献依据步进电机的数学模型 ,规划了步进电机的 PID 操控体系 ,选用 PID 操控算法得到操控量 ,然后操控电机向指定方位运动 。最终 ,经过仿真验证了该操控具有较好的动态呼应特性 。选用 PID 操控器具有结构简略 、鲁棒性强 、可靠性高级长处 ,可是它无法有用应对体系中的不确定信息 。[2]
现在 , PID 操控更多的是与其他操控战略相结合 , 构成带有智能的新式复合操控 。这种智能复合型操控具有自学习 、自习惯 、自组织的才能 ,可以主动辨识被控进程参数 , 主动整定操控参数 , 习惯被控进程参数的改动 ,一起又具有惯例 PID 操控器的特色。[2]
2 自习惯操控
自习惯操控是在 20 世纪 50 时代发展起来的主动操控范畴的一个分支 。它是跟着操控目标的杂乱化 ,当动态特性不行知或发生不行猜测的改动时 ,为得到高功用的操控器而发生的 。其首要长处是简略完成和自习惯速度快 ,能有用地战胜电机模型参数的缓慢改动所引起的影响 ,是输出信号盯梢参阅信号 。文献研究者依据步进电机的线性或近似线性模型推导出了大局安稳的自习惯操控算法 , 这些操控算法都严峻依靠于电机模型参数 。文献将闭环反应操控与自习惯操控结合来检测转子的方位和速度 , 经过反应和自习惯处理 ,依照优化的升降运转曲线 , 主动地宣布驱动的脉冲串 ,进步了电机的拖动力矩特性 ,一起使电机取得更准确的方位操控和较高较平稳的转速 。
现在 ,许多学者将自习惯操控与其他操控办法相结合 ,以处理单纯自习惯操控的缺乏。文献规划的鲁棒自习惯低速伺服操控器 ,保证了滚动脉矩的最大化补偿及伺服体系低速高精度的盯梢操控功用 。文献完成的自习惯含糊 PID 操控器可以依据输入差错和差错改动率的改动 , 经过含糊推理在线调整 PID参数 ,完成对步进电机的自习惯操控 , 然后有用地进步体系的呼应时刻 、计算精度和抗搅扰性 。
3 矢量操控
矢量操控是现代电机高功用操控的理论根底 ,可以改进电机的转矩操控功用 。它经过磁场定向将定子电流分为励磁重量和转矩重量别离加以操控 ,然后取得杰出的解耦特性 ,因而 , 矢量操控既需求操控定子电流的幅值 ,又需求操控电流的相位 。因为步进电机不只存在主电磁转矩 , 还有因为双凸结构发生的磁阻转矩 , 且内部磁场结构杂乱 , 非线性较一般电机严峻得多 , 所以它的矢量操控也较为杂乱 。文献[ 8] 推导出了二相混合式步进电机 d-q 轴数学模型 ,以转子永磁磁链为定向坐标系 ,令直轴电流 id =0 ,电动机电磁转矩与 i q 成正比 , 用PC 机完成了矢量操控体系 。体系中运用传感器检测电机的绕组电流和转自方位 ,用 PWM 办法操控电机绕组电流 。文献推导出依据磁网络的二相混合式步进电机模型 , 给出了其矢量操控方位伺服体系的结构 ,选用神经网络模型参阅自习惯操控战略对体系中的不确定要素进行实时补偿 ,经过最大转矩/电流矢量操控完成电机的高效操控 。[2]
4 智能操控的运用
智能操控不依靠或不完全依靠操控目标的数学模型 ,只按实践效果进行操控 , 在操控中有才能考虑体系的不确定性和准确性 , 突破了传统操控有必要依据数学模型的结构 。现在 , 智能操控在步进电机体系中运用较为老练的是含糊逻辑操控 、神经网络和智能操控的集成 。
4 .1 含糊操控
含糊操控便是在被操控目标的含糊模型的根底上 ,运用含糊操控器的近似推理等手法 ,完成体系操控的办法 。作为一种直接模仿人类思想成果的操控办法 , 含糊操控已广泛运用于工业操控范畴 。与惯例操控比较 ,含糊操控无须准确的数学模型 , 具有较强的鲁棒性 、自习惯性 , 因而适用于非线性 、时变 、时滞体系的操控 。文献[ 16] 给出了含糊操控在二相混合式步进电机速度操控中运用实例 。体系为超前角操控 ,规划无需数学模型 ,速度呼应时刻短 。
4 .2 神经网络操控
神经网络是运用很多的神经元按必定的拓扑结构和学习调整的办法 。它可以充沛迫临恣意杂乱的非线性体系 ,可以学习和自习惯不知道或不确定的体系 ,具有很强的鲁棒性和容错性 ,因而在步进电机体系中得到了广泛的运用 。文献将神经网络用于完成步进电机最佳细分电流 , 在学习中运用 Bay es 正则化算法 ,运用权值调整技能防止多层前向神经网络堕入部分极小点 ,有用处理了等步距角细分问题 。
步进电机的测速办法
步进电机是将脉冲信号转换为角位移或线位移。
一是过载性好。其转速不受负载巨细的影响,不像一般电机,当负载加大时就会呈现速度下降的状况,步进电机运用时对速度和方位都有严格要求。
二是操控便利。步进电机是以“步”为单位旋转的,数字特征比较显着。
三是整机结构简略。传统的机械速度和方位操控结构比较杂乱,调整困难,运用步进电机后,使得整机的结构变得简略和紧凑。测速电机是将转速转换成电压,并传递到输入端作为反应信号。测速电机为一种辅佐型电机,在一般直流电机的尾端装置测速电机,经过测速电机所发生的电压反应给直流电源,来到达操控直流电机转速的意图。






