


无论是小到手持设备仍是大到机械机床,在当今的嵌入式和工业使用中,操控体系的基本要素依然占有着无足轻重的方位。大多数自动操控体系都选用负反应机制来操控物理参数,如方位、速度、扭矩、电压、电流以及强度等。在此,需求操控的参数均由恰当的变换器进行感测,之后再反应回输入与参阅值进行比较。将经采样的输出信号与参阅输入相减,便是所谓的负反应。差异信号(“差错”)扩大后会驱动体系(鼓励),让输出挨近参阅值。换言之,体系可最小化差错信号,因此是一种闭环操控体系。电子机械体系在传统操控体系中占绝大多数,而电机操控则是一种常见的使用。

图1:操控电机速度的闭环体系
一般说来,可将电机操控体系分为各种不同的子体系,如速度、方位或方向操控体系等。咱们首要看一下结构简略的速度操控体系,其电机选用常量电压(V)。在默许情况下,电机在特定的供电电压(V)下具有特定的转速(x)。假如向电机施加相同电压(V)的负载,那么其转速或许下降(y)。这样,咱们就不能操控电机的速度,也便是说不能保证转速不受任何外部要素的影响。这是一种开环体系,因此咱们要采纳必定的反应机制,以便能感应电机的速度并对有关要素进行补偿。
图1显现了闭环电机操控体系。这儿,运动操控器将来自反应体系的信号与实践输入进行比较,以取得差错信号,然后将其扩大后提供给电机。在此体系中,向电机馈送校对因数的“运动操控器”和“扩大器”模块可一同由混合信号操控器完成,而光学滚动编码器则作为传感器,由于咱们能经过操控器轻松对该组件的输出信号进行解码。下文将对上述各个体系的模块做进一步地论述。
DC和步进电机简介
电机便是可将电能转换为机械能的设备。下列给出了不同范畴常用的一些电机类型:
(Ⅰ) DC电机:最简略的DC电机便是在轴上加线圈绕组,固定永磁铁(见图2)。在将电压(V)施加给线圈时,电流(i)经过线圈。由于已有磁场(B),会有力(F)效果在线圈上(弗莱明右手规律)使其滚动。
一旦线圈到达永磁铁的磁极之一,就会遭到斥力并向另一磁极运动,然后构成继续滚动,速度由所施加的DC电压决议。
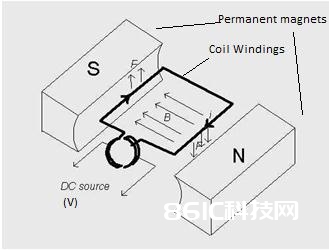
图2:DC电机的作业原理
(Ⅱ) 步进电机:永磁步进电机由永磁转子、线圈绕组和磁传导定子组成。
为线圈绕组施加电压会发生电磁场,呈现南北极。定子承载着磁场。经过次序通电或“步进”定子线圈,能改动磁场,从而生成旋转运动。图2描绘了双相电机的作业情况。在第一步中,为双相定子的A相施加电压,就会将转子磁锁在如图所示的方位,这是由于异性相吸;在第二步中,封闭A相翻开B相,让转子顺时针旋转90度;在第三步中,B相翻开,极性与第一步相反,又发生90度旋转;在第四步中,A相封闭,B相翻开,极性与第二步相反。重复上述序列会让转子每次以90度步进顺时针旋转。
在步进电机中,电机旋转的速度取决于第一步到第四步的履行速度。
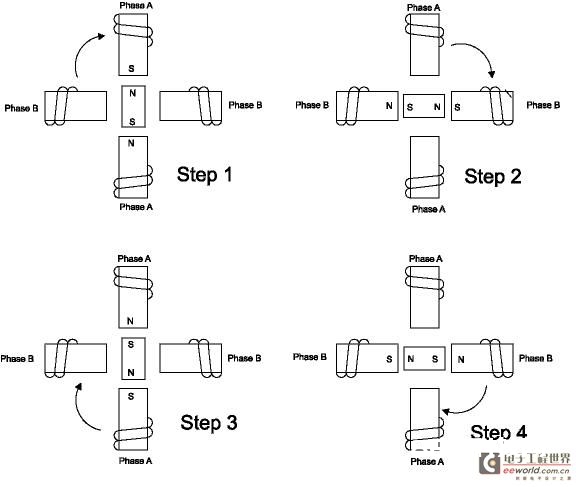
图3:步进电机的作业原理
旋转编码器简介及其分类
电机操控体系的下一个部分便是能感应电机状况并将状况馈送回操控器的反应传感器。如前所述,旋转编码器可发挥反应传感器的效果。






