


焊接是工业出产中十分重要的加工办法,一起因为焊接烟尘、弧光和金属飞溅的存在,焊接的作业环境十分恶劣,跟着人工成本的逐渐进步,以及人们对焊接质量的精雕细镂,焊接机器人得到了越来越广泛的运用。
机器人在焊装出产线中运用的特色
焊接机器人在高质、高效的焊接出产中发挥了极其重要的效果,其首要特色如下:
1.功用安稳、焊接质量安稳,保证其均一性
焊接参数如焊接电流、电压、焊接速度及焊接干伸长度等对焊接成果起决定性效果。人工焊接时,焊接速度、干伸长等都是改变的,很难做到质量的均一性;选用机器人焊接,每条焊缝的焊接参数都是安稳的,焊缝质量受人为因素影响较小,下降了对工人操作技能的要求,焊接质量十分安稳。
2.改进了工人的劳动条件
选用机器人焊接后,工人只需求装卸工件,远离了焊接弧光、烟雾和飞溅等;点焊时,工人不再需求转移粗笨的手艺焊钳,从大强度的体力劳动中摆脱出来。
3.进步劳动出产率
机器人可一天24h连续出产,跟着高速、高效焊接技能的运用,运用机器人焊接,功率进步地愈加显着。
4.产品周期清晰,简略操控产品产量
机器人的出产节拍是固定的,因而组织出产计划十分清晰。
5.可缩短产品改型换代的周期,下降相应的设备出资
可完结小批量产品的焊接自动化。机器人与专机的最大差异便是它能够经过修正程序以习气不同工件的出产。
一、FANUC操控体系概述
FANUC机器人首要运用在奇瑞公司乘用车一厂和乘用车三厂的焊装车间,是奇瑞最早引入的焊接机器人,也是奇瑞公司最早用到具有附加轴的焊接机器人。
其操控体系选用32位CPU操控,以进步机器人运动插补运算和坐标改换的运算速度。选用64位数字伺服驱动单元,同步操控6轴运动,运动精度大大进步,最多可操控到21轴,进一步改进了机器人动态特性。支撑离线编程技能,技能人员可经过离线编程软件设置参数,优化机器人运动程序。操控器内部结构相对集成化,这种集成办法具有结构简略、整机价格便宜、易维护保养等特色。
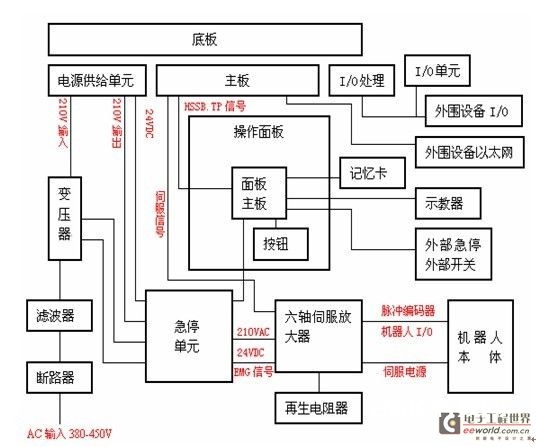
图1 操控原理图
二、FANUC操控体系内部结构剖析
操控器是机器人的中心部分,完结对机器人的动作操作、信号通讯、状况监控等功用。下面以FANUC-F-200iB为例,对其操控体系内部结构和各部分的功用进行剖析:
1)电源供应单元
变压器向电源分配单元输入230V交流电,经过该单元的体系电源分配功用对操控箱内部各作业板卡输出210V交流电及±15V、+24V直流电。
2)安全维护回路
由变压器直接向急停单元供电,并接入内部各操控板卡构成维护回路,对整个体系进行电路维护。
3)伺服放大器
不只供给伺服电机驱动和抱闸电源,而且与绝对值编码器完结实时数据转化,与主控机间选用光纤传输数据,进行实时信号循环反应。4)输入/输出模块
标配为ModuleA/B,别的也可经过在扩展槽装置Profibus板、进程操控板与PLC及外围设备进行通讯。
5)主控单元
整个操控体系的中枢部分,包含主板、CPU、FROM/SRAM组件及伺服卡,担任操控器内部及外围设备的信号处理和交流。
6)急停电路板
用来对紧迫中止体系、伺服放大器的电磁接触器以及准备充电进行操控。
7)示教器
包含机器人编程在内的一切操作都能由该设备完结,操控器状况和数据都显现在示教盒的显现器上。

图2 操控内部结构
三、 毛病事例剖析
机器人操控器断电检修后,对操控器送电,机器人报伺服毛病,毛病代码为SERVO-062。对此毛病进行复位:按MENUS→SYSTEM→F1,[TYPE]→找 MASTER/cal→F3,RES_PCA →F4,YES 后,机器人依然报伺服毛病。
1、毛病剖析和查看:毛病代码SERVO-062的解释为SERVO2 BZAL alarm(Group:%d Axis:%d),毛病或许原因剖析如下:
1) 机器人编码器上数据存储的电池无电或许现已损坏:拆开编码器脉冲数据存储的电池装置盒,电池盒内装有4节一般1.5V的1号干电池,对每节电池的电压进行丈量,均在1.4V以下,电池电压显着偏低,所以替换新电池,再次对毛病进行复位,机器人依然报SERVO-062毛病。
2) 操控器内伺服放大器操控板坏:查看伺服放大器LED“D7”上方的2个DC链路电压检测螺丝,承认DC链路电压。假如检测到的DC链路电压高于50V,就可判别伺服放大器操控板处于反常状况。实践检测发现DC链路电压低于50V,所以初步判别伺服放大器操控板处于正常状况。 进一步对伺服放大器操控板上P5V、P3.3V、SVEMG、OPEN的LED色彩进行调查,承认电源电压输出正常,没有外部紧迫中止信号输入,与机器人主板通讯也正常,扫除伺服放大器操控板损坏。
3) 线路损坏:对机器人操控器与机器人本体的外部电缆连线RM1、RP1进行查看,RM1为机器人伺服电机电源、抱闸操控线,RP1为机器人伺服电机编码器信号以及操控电源线路、结尾执行器线路、编码器上数据存储的电池线路等线路。拔掉插头RP1,对端子5、6、18 用万用表丈量+5V、+24V操控电源均正常。接下来对编码器上数据存储的电池线路进行查看。机器人每个轴的伺服电机脉冲编码器操控端由1-10个端子组成,端子8、9、10为+5V电源,端子4、7为数据坚持电池电源,端子5、6为反应信号,端子3为接地,端子1、2空。拔掉M1电机的脉冲操控插头 M1P,万用表丈量端子4、7,电压为0,相同的办法查看M2~M7电机悉数为0,由此能够判别编码器上数据存储的电池线路损坏。顺着线路,发现正负电源双绞线的一端插头长时间埋在积水中,线路已腐蚀严峻。
2、毛病处理:替换线路后复位,对机器人进行全轴零点复归“ZERO POSITION MASTER”,导入备份程序后康复正常,毛病扫除。
定论
做为日系机器人的首要品牌之一,其在操控原理上与其它品牌机器人大致相同,但其操控部分组成结构有着自己的风格,表现亚洲人的运用习气,比较合适国内运用。我国焊接机器人技能的研讨运用尽管较晚,但借鉴于国外的老练技能,得到了敏捷的开展。09年我公司与哈工大协作开发的奇哈机器人诞生,好像看到了企业与科研协作的力气,觉妥当企业进入的时分,特别是这种运用型企业开端参加设备的研讨的时分,门就渐渐打开了。但焊接机器人是个机电一体化的高技能产品,单靠企业的本身才能是不行的,需求政府对机器人出产企业及运用国产机器人体系的企业给予必定的方针和资金支撑,加快我国国产机器人的开展。






