


引 言c
现行的机械行业中在齿轮规划的进程里,十分缺少对几许参数核算的比较一致的软件,许多时分仅仅选用手艺核算、取大约的数值,关于一些比较杂乱的齿轮来说,制作出来的齿轮存在差错较大。传统的规划办法是依据经历用类比法,结合查表及许多冗杂的公式核算,这样的办法一是作业量大,二是不行能对各参数进行优化及挑选,很难确保齿轮精度规划的合理性。因而,借用了辅佐软件对其进行核算后,对齿轮精度的规划及其相关的数据进行核算机处理,使齿轮的精度规划到达快速、准确、合理,齿轮规划起来就没那么费时和费劲了。我国现有(1)GB/T10095。1-2001渐开线圆柱齿轮精度榜首部分:轮齿等效ISO1328-1。(2)GB/T10095。2-2001渐开线圆柱齿轮精度第二部分:径向归纳等效ISO1328-2。
1. 渐开线圆柱齿轮几许参数核算相关研讨总述
1.1渐开线圆柱齿轮国内的研讨现状
1.1.1齿轮的简介
规范齿轮的结构结构图如图1。
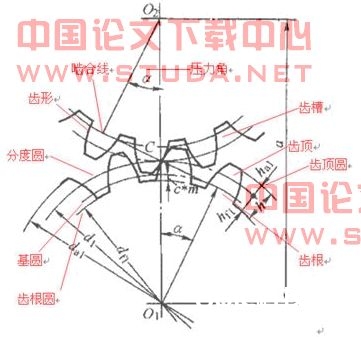
图1 齿轮结构图
齿轮的组成结构一般有轮齿、齿槽、端面、法面、齿顶圆、齿根圆、基圆和分度圆。
轮齿简称齿,是齿轮上每一个用于啮合的凸起部分,这些凸起部分一般呈辐射状摆放,配对齿轮上的轮齿相互触摸,可使齿轮继续啮合作业;基圆是构成渐开线的产生线作纯翻滚的圆;分度圆,是在端面内核算齿轮几许尺度的基准圆。
渐开线齿轮比较简单制作,且传动平稳,传递速度安稳,传动比准确,渐开线圆柱齿轮是机械传动量大而广的根底零部件,广泛在轿车、拖拉机、机床、电力、冶金、矿山、工程、起重运送、船只、机车、农机、轻工、建工、建材和军工等领域中运用。因而现代运用的齿轮中,渐开线齿轮占绝大都,而摆线齿轮和圆弧齿轮运用较小。
1.1.2研讨现状
我国1960 年曾经没有圆柱齿轮精度规范,直接运用苏联TOCT 1643—46规范,1958年起原榜首机械工业部安排力气着手研讨,通过剖析、研讨和验证苏联TOCT 1643—56规范,制定和公布JB 179—60《圆柱齿轮传动公役》机械工业部部规范。对其时机械工业的开展起到活跃推进作用,很快到达世界五十年代水平,在七十年代末国家机械工业改革开放,要求敏捷赶上世界齿轮开展脚步,机械工业部领导下决心,直接以ISO 1328—1975世界根底修订JB 179—60规范,以等效选用ISO 1328—1975规范,公布JB 179—81和JB 179—83渐开线圆柱齿轮精度机械工业部部规范,大力进行宣贯,促进圆柱齿轮精度质量显着的进步。一起带动国内齿轮机床、刀具和量仪的开展,于1998年由技能监督局公布为GB 10095—88渐开线圆柱齿轮精度国家规范。我国在改革开放,开展经济的方针指示下,许多引入德国、日本等西方工业发达国家的工业机械产品,而配件需求国产化,JB 179—83和GB 10095—88规范已不相适应,一方面鼓舞直接选用德国、日本和美国规范,另一方面以宣贯行政文件方式进行弥补。提出齿距差错、齿距累计差错、齿向差错四个为必检项目鉴定齿轮精度等级。宣贯中发现到达齿形差错精度最难。其齿形的齿端部规则不行合理,齿形精度到达要求但齿距精度尚有必定的充裕而不相和谐。部分先进企业总结国内外技能经历,采纳活跃的技能措施,出产出与世界水平适当的齿轮产品。以上这些与ISO1328-1997规范相对照,在许多要害当地是不约而同。当时我国在严重机械装备中所需渐开线齿轮都能够国产化。现行GB 10095—88渐开线圆柱齿轮精度国家规范是等效选用ISO 1328—1975世界规范的,现在世界上已将ISO 1328—1975规范报废由ISO1328-1997规范替代。1997年由国家技能监督局下使命对GB 10095—88规范进行修订,通过对ISO1328-1997规范翻译、消化和寻求各方面定见,绝大大都以为我国齿轮产品应与世界接轨,促进世界和国内齿轮产品的交易,开展齿轮出产。修订GB 10095—88国家规范应同等选用ISO1328-1997世界规范。
现在国家技能监督局和国家机械工业局鼓舞要求技能进步火急和有条件的齿轮制作企业,直接选用ISO1328-1997世界规范作为企业规范出产齿轮先行一步,深化、充分发挥ISO1328-1997世界规范作用,为本企业真实进步齿轮功能质量、下降制作本钱进步经济效益,走入世界市场
。
我国现有(1)GB/T10095。1-2001渐开线圆柱齿轮精度榜首部分:轮齿等效ISO1328-1。(2)GB/T10095。2-2001渐开线圆柱齿轮精度第二部分:径向归纳等效ISO1328-2。
1.2课题研讨的含义
齿轮是机器、仪器中运用最多的传动零件,尤其是渐开线圆柱齿轮的运用更为广泛。齿轮是一个较杂乱的几许体,对单个齿轮的齿廓加工差错国家规范规则了17种操控参数,依据齿轮运用要求的不同,对以上17个参数操控的要求也不同。怎么确认齿轮的精度等级以及依据其精度等级确认相关操控参数的公役值,是齿轮规划的要害所在。传统的规划办法是依据经历用类比法,结合查表及许多冗杂的公式核算,这样的办法一是作业量大,二是不行能对各参数进行优化及挑选,很难确保齿轮精度规划的合理性。因而,借用了辅佐软件对其进行核算后,对齿轮精度的规划及其相关的数据进行核算机处理,使齿轮的精度规划到达快速、准确、合理,齿轮规划起来就没那么费时和费劲了。
1.3规划的研讨思路与研讨的要点
本规划的研讨要点是渐开线圆柱齿轮传动规划的核算。研讨外啮合齿轮和内啮合齿轮传动的首要几许参数核算、齿轮齿厚核算、精度核算和强度核算,协助完成齿轮的合理规划。
2. 渐开线圆柱齿轮几许参数核算的辅佐软件的首要研讨内容
2.1齿轮传动规划进程
齿轮传动规划进程:
1、简化规划:依据齿轮传动的齿数、啮合角和模数等,确认中心距等首要参数。
2、几许规划核算:规划和核算齿轮的根本参数,并进行几许尺度核算。如:核算分度圆直径、齿高、齿顶高、齿根高、基圆直径等。
3、齿厚丈量尺度核算:依据上步的核算结果和已知参数,核算齿轮的齿厚参数。如:固定弦齿厚、固定弦齿高级参数。
4、精度核算:核算出齿轮的精度丈量参数,如:各级精度等级、齿厚上/下差错、侧隙公役、最小/大极限侧隙等。
5、强度校核:在根本参数确认后,进行准确的齿面触摸强度和齿根曲折强度校核。别离将核算出的触摸/曲折强度答应传递功率与已知功率相比较,假如都大于实践功率,则所规划的齿轮强度过关。
6、假如校核不满意强度要求,能够回来2),修正参数,从头核算。课题研讨的首要内容便是规划一个进行齿轮规划的核算软件,现在课题是几许尺度核算,首要应会集在此,精度仅仅其间一部分。在规划渐开线圆柱齿轮时会核算出其齿数、齿形和齿高级。
2.2渐开线圆柱齿轮几许参数 2.2.1外啮合规范圆柱齿轮传动几许尺度核算
外啮合规范圆柱齿轮传动参数核算如表1。
表1 外啮合规范圆柱齿轮传动参数

2.2.2外啮合高度变位齿轮传动的几许尺度核算
外啮合高度变位齿轮传动的参数核算如表2。
表2 外啮合高度变位齿轮传动的参数


2.2.3内啮合规范齿轮传动的几许尺度核算
内啮合规范齿轮传动的参数核算如表3。
表3 内啮合规范齿轮传动的参数


2.2.4内啮合高度变位齿轮传动的几许尺度核算
内啮合高度变位齿轮传动的参数核算如表4。
表4 内啮合高度变位齿轮传动的参数

2.3本课题研讨方针
核算出渐开线齿轮的模数、齿数、齿形、齿高、变位、基准齿形和参数(GB/T1356-1988)、模数系列(GB/T1357-1987)、传动类型和根本参数、变位系数的挑选、渐开线圆柱齿轮的齿厚丈量核算、精度挑选和强度核算。
本课题研讨的几许尺度核算的适用范围包含:
1、规范圆柱齿轮(直,螺旋)
2、外啮合(高度变位)圆柱齿轮(直,螺旋)
3、内啮合规范齿轮(直齿)
4、内啮合(高度变位)圆柱齿轮(直,螺旋)
3. 软件的详细完成 3.1体系完成的环境
本规划软件运用C#言语开发,开发渠道为VS2005软件,运转环境是Windows XP
3.2软件的总流程图
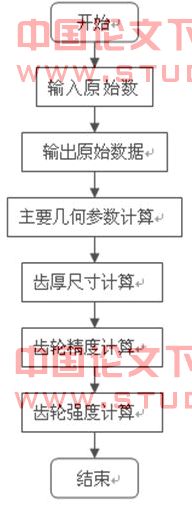
图2 程序总流程图
3.3软件完成的主界面

图3 核算外啮合齿轮副时的界面
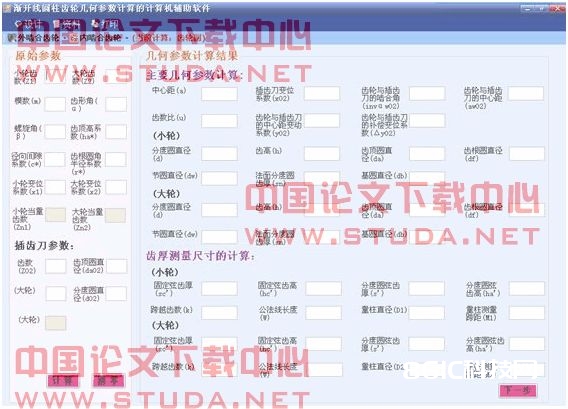
图4 核算外啮合齿轮副时的界面

图5 精度核算时的运转界面
3.4 完成的部分代码 3.4.1完成的首要功能
1、 外啮合齿轮几许参数和齿厚核算的功能模块
private void button1_Click(object sender, EventArgs e) //外啮合核算
{
if (tBoxα.Text != 20) //判别输入是否为规范输入
str = 请输入规范齿形角α!n;
else if (Convert.ToInt32(tBoxβ.Text) 0 || Convert.ToInt32(tBoxβ.Text) > 45)
str += 请挑选合理的螺旋角β!n;
else if (Convert.ToInt32(tBoxha.Text) != 1)
str += 请挑选合理的齿顶高系数!n;
else if (Convert.ToDouble(tBoxc.Text) != 0.25)
str += 径向空隙系数挑选不正确,请从头填写!n;
else if (Convert.ToDouble(tBoxr.Text) != 0.38)
str += 齿根圆角半径系数挑选不行准确!n;
else if (Convert.ToDouble(Convert.ToInt32(Convert.ToDouble(tBoxZ1.Text))) != Convert.ToDouble(tBoxZ1.Text) || Convert.ToDouble(Convert.ToInt32(Convert.ToDouble(tBoxZ2.Text))) != Convert.ToDouble(tBoxZ2.Text))
str += 齿数请输入为整数!n;
else //别离把输入的值赋给各变量
{
α1 = Convert.ToInt32(tBoxα.Text);
β1 = Convert.ToDouble(tBoxβ.Text);
α2 = Math.PI * α1 / 180;
β2 = Math.PI * β1 / 180;
n = Math.Cos(β2);
u = 1;
m = Convert.ToDouble(tBoxm.Text);
ha = Convert.ToInt32(tBoxha.Text);
hat = ha * n;
c = Convert.ToDouble(tBoxc.Text);
ct = c * n;
r = Convert.ToDouble(tBoxr.Text);
rt = r * n;
if (tBoxpa_s.Enabled) //规范齿轮几许参数核算
{
Z0 = Convert.ToInt32(tBoxZ1.Text);
ha01 = ha * m;
hf0 = 1.25 * m;
h0 = ha01 + hf0;
if (tBoxβ.Text != 0)
{
a0 = Z0 * m / n;
d0 = m * Z0 / n;
}
else
{
a0 = Z0 * m;
d0 = m * Z0;
}
a = a0;
da0 = d0 + 2 * ha01;
df0 = d0 – 2 * hf0;
db0 = d0 + Math.Cos(α2);
pa = Math.PI * m * Math.Cos(α2);
//规范齿轮齿厚核算
sc0 = 0.5 * Math.PI * m * Math.Cos(α2) * Math.Cos(α2);
hc0 = ha01 – Math.PI * m * Math.Sin(2 * α2) / 8;
invαt = Math.Tan(α2) – α2;
if (tBoxβ.Text != 0)
{
s0 = m * Z0 * Math.Sin(Math.PI * n * n * n / (2 * Z0)) / (n * n * n);
ha02 = 0.5 * da0 – (0.5 * m * Z0 / (n * n * n)) * (Math.Cos(Math.PI * n * n * n / (2 * Z0)) – Math.Sin(β2) * Math.Sin(β2));
k0 = (α1 / 180) * Z0 + 1;
W0 = (Math.PI * (k0 – 0.5) + Z0 * invαt) * m * Math.Cos(α2);
}
else
{
s0 = m * Z0 * Math.Sin(Math.PI / (2 * Z0));
ha02 = 0.5 * da0 – 0.5 * m * Z0 * Math.Cos(Math.PI / (2 * Z0));
k0 = (α1 / 180) * Z0 + 1;
W0 = (Math.PI * (k0 – 0.5) + Z0 * invαt) * m * Math.Cos(α2);
}
}
核算外啮合和内啮合各种齿轮,原理根本相同,要点留意的是取值的准确度问题,以及澄清各参数之间的联系,以便于核算,防止数值的混杂。
2、确认部分重要精度参数的取值函数
public static int fpb_value(double x, double y, string z) //基节极限差错fpb取值
{…}
public static int Fβ_value(int x, string y) //齿向公役Fβ取值
{…}
public static double fa_value(double x, string y) //中心距极限差错fa取值
{…}
public static int fpt_value(double x, double y, string z) //齿距极限差错fpb取值
{…}
public static int Fr_value(double x, double y, string z) //齿圈径向跳动公役Fr取值
{…}
public static double br_value(string x, double d) //切齿径向进刀公役br取值
{…}
public static char code_value(double x) //差错代号
{…}
3.4.2软件完成和传统人工核算的比较
对齿轮进行规划时,传统的人工核算具有很大的局限性,下面就罗列两个比较突出的比如进行比较阐明。
1、在核算几许参数时,已知参数invα且invα=tanα-α,要番过来求α的值,此规划中我运用的二分法查找的思想来求解(代码如下),其间取值的精度准确到了10-8。假如如此巨大的核算量进行人工核算,作业量可想而知,并且有存在很大的差错乃至是过错的或许,但借用了此核算机辅佐软件,马上就能够得到满意的答案。
private double inv(double x)
{
double f = 0, r = Math.PI / 2, b, fun; //设置变量f,r,b,fun
b = Math.PI / 4; //因为0α(π/2),所以取榜首个二分时b=π/4
fun = Math.Tan(b) – b; //求出当b=π/4时fun的值
while (Math.Abs(fun – x) > 0.00000001) //当差错小于10-8时跳出循环
{
if (fun – x > 0) //若fun大于x,取中心值的左面区间进行循环
{
r = b;
b = (f + r) / 2; //取新区间的中值
fun = Math.Tan(b) – b;
}
else if (fun – x 0) //若fun小于x,取中心值的右边区
{ 间进行循环
f = b;
b = (f + r) / 2; //取新区间的中值
fun = Math.Tan(b) – b;
}
else //若fun与x的值持平,跳出循环
break;
}
return(b);
}
求解进程流程图如下图图6。

图6 用二分法求解进程流程图
2、求内啮合高度变位齿轮的齿厚尺度的大轮固定弦齿高和分度圆弦齿高时,公式如下:
1)固定弦齿高:
hc2 = 0.5 * (d2 – da2 – sc2 * Math.Tan(α2)) + 0.5 * da2 * (1 – Math.Cos(δa2));
其间,有需求核算参数δa2:
δa2 = Math.PI / (2 * Z2) – invαt – 2 * Math.Tan(α2) * x2 / Z2 + invαa2;
2)分度圆弦齿高:
ha2L = 0.5 * d2 * (Math.Cos(delta) – Math.Sin(β2) * Math.Sin(β2)) / (n * n) – 0.5 * da2 + 0.5 * da2 * (1 – Math.Cos(δa2));
其间,又需求核算参数delta:
delta = (Math.PI / (2 * Z1) + 2 * x1 * Math.Tan(α2) / Z1) * n * n * n;
如此冗杂、作业量大的核算量,进行人工核算一起也是件很磨难、很难完成的工作。
4.定论
正因为在产品的规划进程中齿轮几许参数的挑选是影响产品具有杰出的啮合和节能低耗作用的重要因素,假如齿轮在规划时参数的挑选不行准确,仅仅选用人工凭经历的预算(并且有存在核算过错的危险),将直接影响所出产产品的质量,有损企业的开展。凭借核算机辅佐软件,就能够很大程度上减低了这方面的本钱和危险。在加工齿轮时,技能人员常常要进行各种齿轮几许及啮合参数的核算。传统办法用手艺、核算器及查表核算、速度慢、精度低,即使是价格较贵的可编程核算器也远不能满意高精度杂乱核算的要求。而市场上用于齿轮核算的软件都较贵,且不合适部分中小企业的规划需求。为此,规划了此渐开线圆柱齿轮的几许参数核算的核算机辅佐软件。
参考文献
①江耕华,蛮干,陈启松等.机械传动规划手册(上册)[M].北京:煤炭工业出版社,1982.
②齿轮精度国家规范宣贯作业组.齿轮精度国家规范运用攻略[M].北京:兵器工业出版社,1990.
③北京业余机械学院工人班集体.齿轮原理与制作[M].北京:科学出版社,1971.
④马骏.C#网络运用编程根底[M].北京:人民邮电出版社,2008.
, , ⑤罗斌.Visual C#.NET精彩编程实例集锦[M].北京:我国水利水电出版社,2005.
⑥明日科技.C#开发经历技巧宝典[M].北京:人民邮电出版社,2008.
更多核算机与外设信息请重视:21ic核算机与外设频道






