


今日,电子动力转向体系(EPS)已成为削减二氧化碳排放的要害要素之一。因而各种不同类型的轿车都装备有机电动力转向体系。那么在完结电子助力转向体系时需求用到哪些技能呢?
EPS是一种机电动力转向体系,它用电子操控的马达替代本来的水压助力转向设备。EPS体系在发动机舱内占用更少的空间,更简单拼装,并且能够节约燃油耗费。别的它在转向体系中不再运用有毒的液压油。在小型车辆中,马达是经过齿轮箱连接到转向柱的,而在中型轿车内,马达运用凸缘架斜向或纵向安装在齿轮架上,并经过齿轮箱作业。当司机滚动方向盘时,马达就为转向体系供给动力。
EPS体系是怎么作业的?
电子动力转向体系由一个操控单元、很多传感器和一个无刷马达组成。操控单元对体系进行操控,并供给马达所需的信息。别的,它还从传感器接纳信息,这些传感器首要用来丈量方向视点、驾驭速度和扭矩等参数。检测马达方位和马达电流的传感器可保证马达作业在最佳状况。图1为带体系监督功用的高阶电子机械动力转向体系要害组件。XC2300作为主处理器操控着伺服马达和其它组件。第二个较小的微操控器或ASIC则作为监控单元。
EPS体系中的首要组件
传动设备是一个三相同步或异步无刷马达。马达的旋转场以电子办法发生。信号频率约20kHz的脉冲宽度调变(PWM)信号将影响马达的速度和扭矩。
旋转编码器或磁性传感器,即所谓的巨型磁阻(GMS),能够供给辨认转子方位的数据。一般两个相位电流是经过分路电路或霍尔传感器丈量的。上述传感器都是模仿输出,因而需求经过扩大才干用于进一步的处理。作用在转向柱上的力气以及马达要求的助动力经过扭矩传感器丈量。信号处理在操控单元中完结。车轮传感器供给轿车速度信息,转向视点传感器供给方向盘现在方位信息。其它操控单元则处理这些信号。数据是在CAN总线上传输的。能够在传感器中整合一些评价逻辑,详细取决于体系选用的传感器类型。这样能够进步精密度,削减犯错的可能性。
操控单元由很多的稳压器、CAN收发器、信号处理电路、桥式驱动器、电源开关和微操控器组成。
稳压器供给传感器、微操控器和ASIC所需的各种电压。CAN收发器用于CAN总线和微操控器之间的桥接。数据信号处理是模仿仍是数字办法取决于传感器类型。因为微操控器不能直接操控电源开关(B6桥),因而需求桥式驱动器。桥式驱动器发生快速开关晶体管所需的闸极电压和相关电流。智能驱动器还包括有确诊接口,它能检测各种问题,如半桥短路、低相位电压或组件高温。微操控器操控和监督马达与整个体系,它还有必要履行确诊功用,并与网络进行通讯。此外还选用了别的一个操控器来进行检错,并在必要时发动紧迫作业方式。
因为EPS体系在马达动态和?定扭矩方面有很高的要求,故它们需求选用杂乱的算法,如FOC(针对场的操控)。这种操控直接作用于马达的转子场上,需求适当强的处理才能,因为它触及运算多个坐标转化(Clark/Park转化),并须以50μs距离调理两个相位电流。需求经过一个PWM信号并运用空间向量办法对马达进行操控。因为MAC单元功用十分高,因而所需的CPU负载还不到10%。
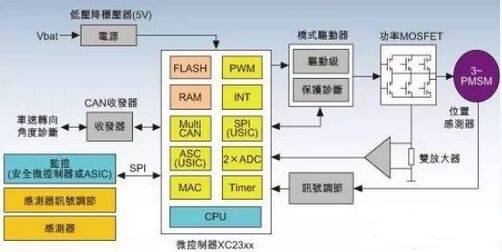
图1:具有体系监督功用的电子机械动力转向体系中的要害组件。
XC2300微操控器
XC2300微操控器是英飞凌公司XC2000微操控器系列的新产品,该组件可解决体系监督问题,能够快速处理严厉的操控算法,并具有广泛的内建硬件支撑。总归,它能够快速且高效地处理各种杂乱的使命。
为了增强可靠性,XC2300在安全方面选用了循环冗余校验(CRC)来验证感应数据,其间触及两次写入数据以及二者的比较。整个内存体系受硬件纠错单元的维护。为了整合不同的软件模块,还设立了一个内存维护单元。
XC2000的架构是以之前开发的C166中心为根底,可供给先进的操控和DSP功用。但是,与C166架构不同的是,它具有高功用管线结构,故可在单频率周期内履行指令。在相同的频率速度下,XC2300的处理才能约为C166的两倍。XC2300还整合一个乘法累加单元,可简单完结矩阵作业或有限脉冲响应(FIR)滤波器功用。这意味着可在单频率周期内履行累积32位加法或减法的 16×16位乘法。快速的矩阵作业处理(Clark/Park转化)和PI操控器在EPS中都发挥了重要作用。XC2300支撑最多128个中止源,共有 16个中止等级。除了典型的中止处理,该处理器还以外围事情操控器(PEC)的方式供给可选的DMA传送功用,答应在16MB的地址空间中轻松地移动或仿制大型数据区块。程序内存存取为64位宽,现在最高支撑576KB的嵌入式闪存。闪存在实体上被分红多个模块,并选用了纠错和监督功用,可获得更高的履行可靠性。每个闪存区都可经过暗码别离完结读写维护。可用来办理数据的嵌入式 SRAM容量为50KB。此外还选用了一种额定的维护机制来避免对重要CPU缓存器的未授权存取。为了进一步进步履行可靠性,当某些受限指令被履行或者是 CPU仓库写入溢出时也能够触发维护机制。
外围功用
XC2300的外围模块包括了灵敏的守时单元、三个US%&&&&&%模块(用于支撑不同的同步和异步串行接口)、撷取/比较(CAPCOM)模块、一个实时频率和看门狗功用、两个独立的高速10位A/D转化器(转化时刻》=1.2μs)以及三个CAN模块。很多的触发器资源答应AD转化与具有相应推迟的CAPCOM守时器单元之间完结同步。内建有限的几个查看器能够对多个电压源进行后台监督,不会添加CPU任何担负。
CAPCOM6撷取/比较单元是专门开发来支撑独立于CPU的多相马达操控。以CPU频率作为其履行频率的两个独立的16位宽守时器被作为时刻基准。CAPCOM6模块能够发生多达7个的独立脉宽调变信号,或贮存输入信号持续时刻和作业周期。它在80MHz的体系频率下能够供给12.5ns的分辨率。一个8位的守时器支撑死区时刻(dead time)发生。该信号能够独自分配给每个通道。因为选用了同步规划和影子缓存器,缓存器更新可得到正确的界说。CAPCOM6单元支撑同步和异步脉宽调变。在发生错误时,每个输出都能够当即进入不活动状况。在一个体系中,运用两个CAPCOM6单元能够最多操控两个马达。一切外围模块都经过一条高速16 位外围总线连接到CPU。XC2300系列微操控器中外围模块的整合度比其它微操控器架构要高,因而CPU能够会集资源履行运算和确诊使命。XC2365 微操控器中的要害功用模块如图2所示。






