


低本钱的GPS搅扰和诈骗技能的可用性使得仅GPS的定位和导航处理方案关于在战场环境中的战士而言,成为日益风险的挑选。因而,至关重要的是,有必要开发一种独立的,非基础设施的定位技能,以坚持现代战士的最佳作战才能。
惯性导航能够处理此问题。
可是惯性处理方案并不简略施行。例如,在战场上,战士往往会逃避,爬升,逃避和奔驰,然后带来运动丈量应战,即便在现有的车辆惯性导航设备中,该差错一般也会太大,然后导致盯梢差错。
全球定位体系
几十年来,GPS一直是战场上战士的首选盯梢和导航处理方案。不幸的是,大多数敌人现在都能够运用十分廉价且广泛运用的技能来搅扰GPS定位信号。可是更风险的是,不只GPS信号会被堵塞,还或许被诈骗。在最坏的情况下,敌人或许将战士转移到风险地带,乃至或许使战士无意中向自己的方位开战。
MEMS导航
市场上现已有许多惯性丈量单元(IMU),但还没有一个能够充沛处理惯性行人盯梢的问题。它们是终究处理方案中极具吸引力的一部分,因为它们仅依赖于丈量用户运动发生的力,而独立于基础设施技能(例如WiFi,BLE信标或其他根据RF或根据摄像头的锚定技能)进行操作–因操作艺人的不良行为而被卡住,诈骗或误入歧途。
可是,现在尚不存在能够充沛整合用户加速度以真实盯梢方位的IMU,但一同也不会因战士在战场上的活动而被扔掉。经过添加惯性传感器的灵敏度以精确地丈量由人类运动发生的小加速度,对人类运动的其他伪像的灵敏性在传感器丈量光谱的相对侧上发生了显着的差错。也就是说,饱和度以及其他由高强度和快速运动引起的差错会发生乃至更大的差错,这使得这种盯梢十分困难。
抱负情况下,MEMS惯性传感器体积小,重量轻,功耗低且本钱低,十分合适拆开的战士运用。换句话说,它们具有低SWaP-C的一切最抱负的特性(尺度,重量和功率本钱)。每个战士都能够轻松地带着一个或多个兵器-放在手表,背包,头盔或兵器上。可是,它们在灵敏度,噪声,偏置漂移和其他相关错误模式方面的功用使其在惯性导航中的体现十分差。在几分钟之内,或许会累积多达数百米乃至数千米的定位差错,然后使其惯性导航成效无法运用。可是,它们能够经过航位估测法合理地运用于方位盯梢。
核算最简略的方式是经过丈量用户在一系列方向上跋涉了多远来盯梢用户的方位。假如IMU能够供给相关于北方的相对精确的方向(磁罗盘),然后丈量用户现已走了多远(步进计数),则能够构建一个适当精确的方位。出产精确,牢靠的MEMS航位核算体系存在许多应战,但至少该运用不会打破传感器自身的功用极限。
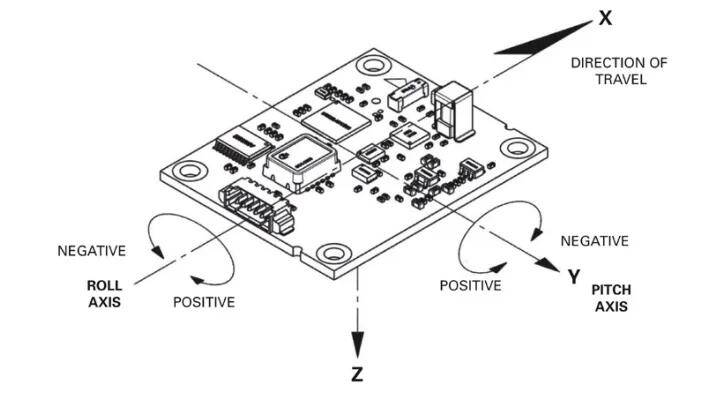
MEMS陀螺仪是一种由硅微加工而成的光盘,被激起后以显着高于要丈量的运动带宽的速率振荡。当光盘沿一个轴振荡时,假如沿其灵敏轴旋转,则会发生科里奥利力,该力将振荡力发送到正交轴上,该正交轴被丈量并与旋转的角速度成份额。可是,与该旋转速率相对应的信号起伏很小,它不是位移的直接丈量值,而是随时刻改变的位移率,然后需求将其积分到角位移中。可是,它只需求一次积分,而不需求运用加速度计确认线性位移所需的二次积分。
陀螺仪仅用于丈量相关于恣意起点的相对旋转。它不受线性加速度的影响(或简直不受线性加速度的影响),因而不管冲击和振荡怎么,它都有助于供给十分精确的旋转丈量。因为其丈量特性,它可供给精确的角位移,且推迟和超调量极低。
从A点到B点
IMU能够精确确认跋涉方向,然后盯梢战士脱离A点后的途径。需求路程表功用来丈量他们向B点跋涉时在任何给定方向上跋涉了多远。轿车的路程表相对简略。有一个传感器,它核算轿车车轮的部分和彻底旋转的次数,并将其乘以车轮的周长得出一个适当精确的跋涉间隔。现代路程表的精确度可到达轿车实践跋涉间隔的0.1%之内。对人来说,相似的功用仅仅计步器或计步器。在曩昔的五年中,因为活动设备,智能手表和手机的运用,计步器得到了极大的改进。
这种办法的复杂性在于确认步行,慢跑,跑步乃至匍匐的不同步幅。有几种可用的办法能够很好地确认步幅长度-例如,在有GPS掩盖规模的情况下对敞开天空中的步数进行计数,然后将跋涉间隔除以两个端点之间采纳的步数。不管怎么,这是一个可处理的问题,仅取决于特定用例的可接受程序。
在战役中导航
现在,最新一代的MEMS陀螺仪能够很好地盯梢战士的动态运动长达30分钟,而不会呈现显着的差错或份额差错。咱们开发的体系现在还无法与它们合作的仅有办法是运用陀螺罗盘技能将其锁定在North上,因为它们的1/f噪声依然约高50倍。MEMS十分合适在短时刻内盯梢高动态运动,例如与Wii控制器一同玩。可是关于需求低噪声和高灵敏度的运用,例如丈量地球每小时15°的自转速度(这是一个很小的信号),还远远不够。
寻觅坐标
能够经过纬度和经度来确认肯定地舆方位。
纬度
IMU的加速度计能够直接丈量重力加速度矢量的方向,这意味着它能够精确地确认向下的方向(朝向地球中心)。陀螺仪能够精确地丈量地球在给定方位的自转角速度的X,Y和Z重量。然后,能够经过运用这两个丈量值轻松确认纬度。
经度
经度能够经过丈量测得的地舆北部和磁性北部之间的偏角来核算。两者沿不同的轴对齐,因而在您的经度上,它们之间的方向一直存在差错。因为两种丈量都是在三个维度上进行的(地球自转轴和从地球磁偶极子轴发生的通量线),因而您能够转化这两个维度之间的三维空间差异,以便纵向定位球体的外表,尤其是在从前的丈量现已确认了纬度的情况下。
具有高级陀螺仪的IMU能够经过陀螺罗经(或向北寻线)来定位真北,可是它需求一个磁罗盘来定位磁北。可是,虽然有许多要说的磁传感器能够让您直接向北读取数据,但丈量的易错性依然存在严峻的问题。除了校准用户身体上的硬铁和软铁搅扰之外,一般还会呈现难以处理的外部磁畸变。例如,假如一个战士走过用钢筋制作的墙,则会在磁丈量中发生很大的差错。在城市战役环境中,还有许多其他搅扰源,包含车辆,建筑物,兵器,法则以及战士或许遇到的许多其他结构。






