


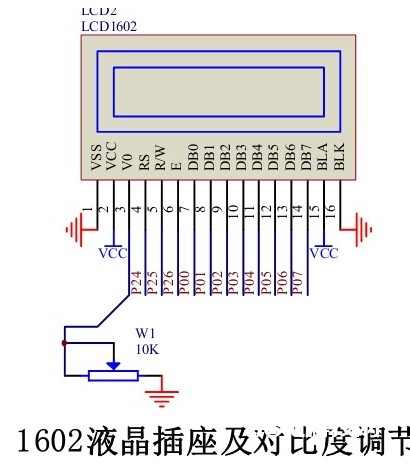
单片机对1602液晶的驱动-液晶的基本操作时序:
1.1读状态:输入:RS = L,RW =H,E = H输出D0~D7
1.2写指令:输入:RS = L,RW = L,D0~D7指令码,E = 高脉冲,输出:无;
RS是数据命令选择端(H/L);
1.3读数据:输入RS= H,RW=H,E=H
1.4写指令:输出,RS = L,RW = L,D0~D7=数据,E=高脉冲
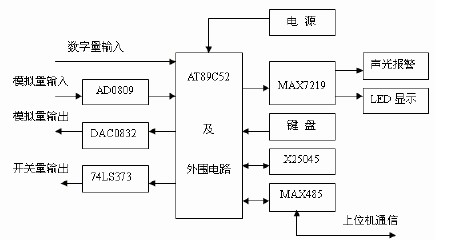
单片机的硬件抗干扰技术解析-干扰的分类有好多种,通常可以按照噪声产生的原因、传导方式、波形特性等等进行不同的分类。按产生的原因分: 可分为放电噪声音、高频振荡噪声、浪涌噪声。 按传导方式分:可分为共模噪声和串模噪声。 按波形分:可分为持续正弦波、脉冲电压、脉冲序列等等。
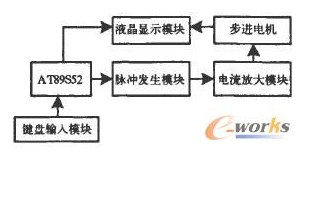
AT89S52单片机对混合式步进电机的控制设计-控制系统的设计分为两大部分:硬件部分和软件部分。硬件部分的设计包括脉冲发生模块、电流放大模块、液晶显示模块和键盘输入模块四个部分。软件部分的设计包括键盘扫描模块、脉冲发出模块、液晶显示模块、延时模块和加减速模块等。
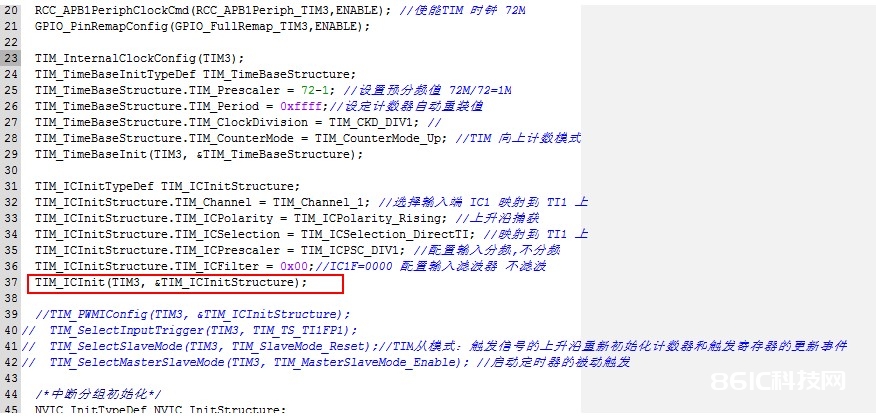
STM32单片机的PWM输入捕获模式设计-(TIM_GetITStatus(TIM3,TIM_IT_CC1)==SET)//{ic1=TIM_GetCapture1(TIM3)+1;//周期ic2=TIM_GetCapture2(TIM3)+1;//脉冲宽度floatpulse=ic2/(float)ic1;//占空比FAN_Frequency=(u32)1000000/ic1;//频率}//TIM_SetCounter(TIM3,0);TIM_ClearFlag(TIM3,TIM_FLAG_CC1);TIM_ClearITPendingBit(TIM3,TIM_IT_CC1);//清楚TIM的中断待处理位。
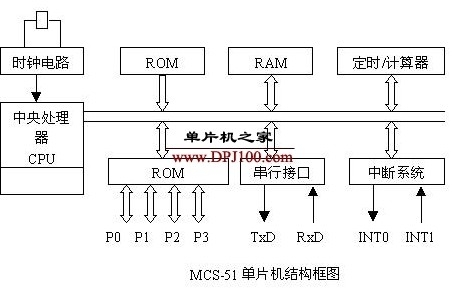
MCS-51单片机的时序单位的定义说明-我们把振荡脉冲的周期定义为节拍(为利便描述,用P表示),振荡脉冲经由二分频后即得到整个单片机工作系统的时钟信号,把时钟信号的周期定义为状态(用S表示),这样一个状态就有两个节拍,前半周期相应的节拍我们定义为1(P1),后半周期对应的节拍定义为2(P2)。

STM32单片机通用定时器对lED灯的翻转控制设计-通用定时器是一个通过可编程预分频器驱动的16位自动装载计数器构成。它适用于多种场合,包括测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM)。使用定时器预分频器和RCC时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。每个定时器都是完全独立的,没有互相共享任何资源。它们可以一起同步操作。
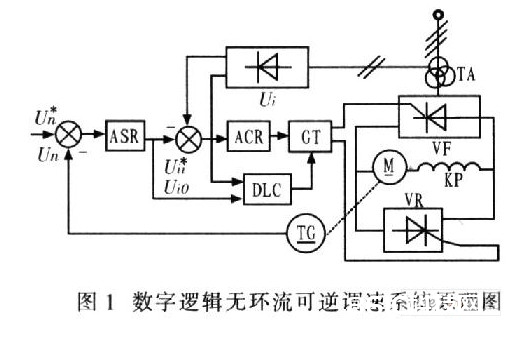
AT89C51单片机数字逻辑无环流可逆调速系统设计-该数字逻辑无环流可逆调速系统是由AT89C51单片机实现双闭环控制、无环流逻辑控制、触发脉冲的形成及相位控制,如图1所示。图1中,ASR为速度环,ACR为电流环,DLC为无环流逻辑控制器,GT为触发脉冲,TA为电压互感器,TG为测速发电机,M为直流电动机。主电路采用正组VF和反组VR两组晶闸管装置反并联。控制电路采用转速ASR和电流 ACR双闭环系统。

51单片机计数器和定时器的本质区别及应用方法-计数器和定时器的本质是相同的,他们都是对单片机中产生的脉冲进行计数,只不过计数器是单片机外部触发的脉冲,定时器是单片机内部在晶振的触发下产生的脉冲。当他们的脉冲间隔相同的时候,计数器和定时器就是一个概念。
51单片机串行口的工作方式解析-方式0是外接串行移位寄存器方式。工作时,数据从RXD串行地输入/输出,TXD输出移位脉冲,使外部的移位寄存器移位。波特率固定为fosc/12(即,TXD每机器周期输出一个同位脉冲时,RXD接收或发送一位数据)。每当发送或接收完一个字节,硬件置TI=1或RI=1,申请中断,但必须用软件清除中断标志。
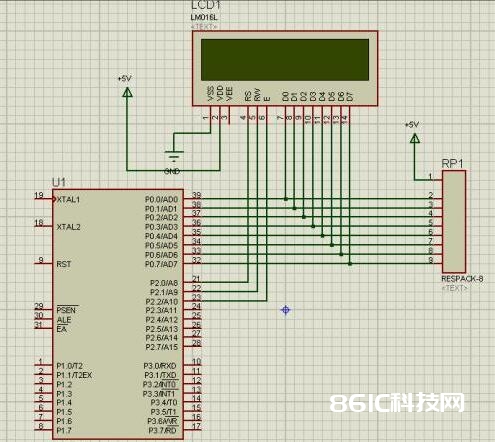
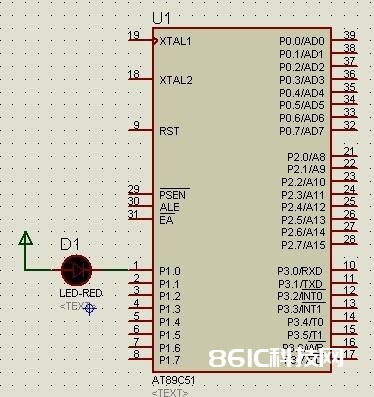
51单片机对602LCD显示器的驱动设计-;信号来源:
;1、软件里对 P1.4定时取反,形成输出脉冲,接到 P3.5 可自测。
; 显示结果:P1.4 → P3.5 显示: 000010 (Hz)
;如果有条件的话,可使用专用设备(信号发生器和频率计)进行校正。
;频率计的程序
;包含:外部中断设置,中断服务程序,定时程序,定时服务程序
;以及数据处理,显示,包括 三位十进制数转化为四位BCD码,
