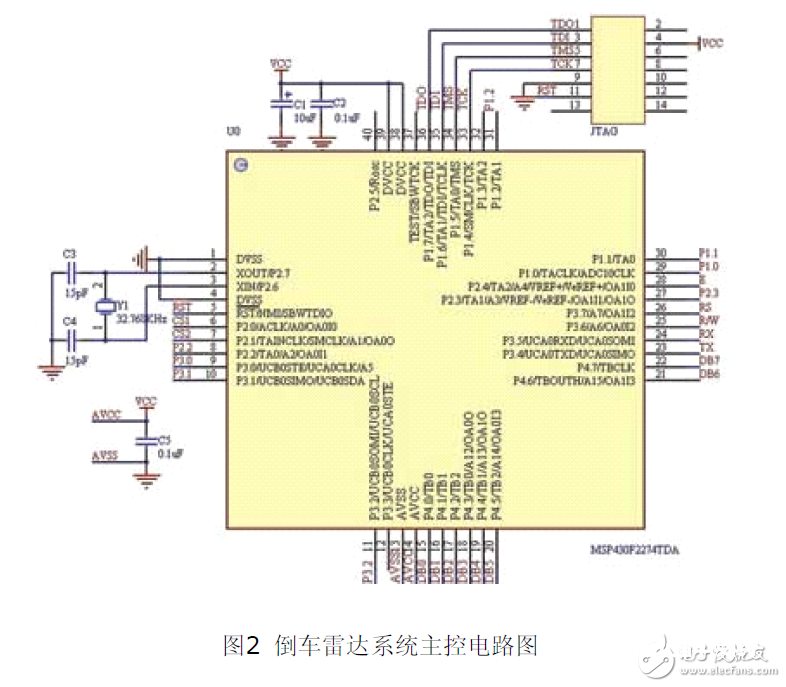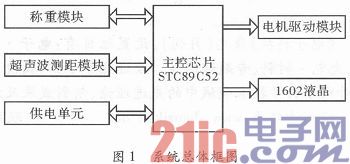
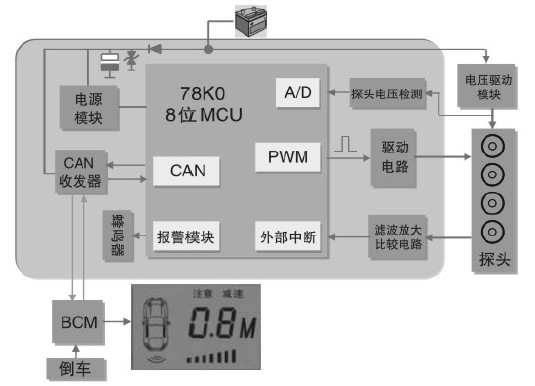
摘要 为增加客车的安全性,提出了一种基于STC89C52单片机同时具有防超载和防撞功能的客车安全系统。通过研究超声波测距原理和脉冲宽度调制原理,并对车身重量和障碍物的距离进行实时监测以实现其功能。对
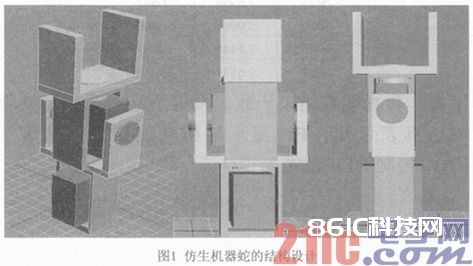
摘要:文章主要描述仿生机器蛇的设计,包括机器蛇的结构设计和运动规划连贯动作的实现。通过对蛇形机器人在有障碍物和无障碍物环境中,进行不同连贯动作的运动规划和运动形式变化,找出机器人设计的不同侧重点;最后
AGV全称Automatecl Guided Vehicles,是一种装有自动导引装置,能够沿规定的路径行驶,具有编程和停车选择装置、安全保护装置以及各种物料移载功能的自动导航车。障碍物检测是自动导


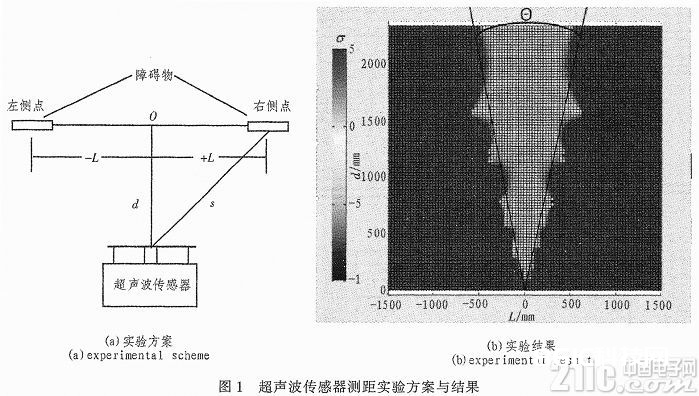
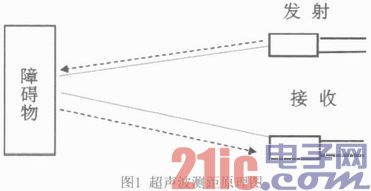
基于超声波避障技术是建立在获取机器人前方障碍物的距离和位置信息上,故超声波避障技术主要运用超声波传感器,根据超声波测距原理,结合矩阵式结构设计理念的数据融合对机器人前方障碍物的距离和位置进行定位。超声
摘要:文章设计了一种基于超声波测距原理的导盲系统。系统以STC125A60S2单片机为核心控制器件,利用渡越时间法测量经温度传感器DB18B-20补偿后的距离,实现对盲人行走道路上障碍物距离的测量及定
障碍物遮挡问题,是短波通信当中的一个常见问题,尤其是对于体积、尺寸较大的短波侦收天线、测向天线影响较大。主要影响天线的方向图和增益,进而影响通信效果。本文通过FEKO软件仿真计算了不同形式的障碍物对两