



PIC单片机的程序编写和空间分配时应注意哪些问题-控制部分采用PICl6F7X系列单片机,运用汇编语言编程,运行速度较快,能够达到系统的要求。在这里使用的大多是数字信号的控制,电机的控制只有开和合两种状态。在动作的过程中需要两只手臂、身体、头部、脚部等的协调动作。
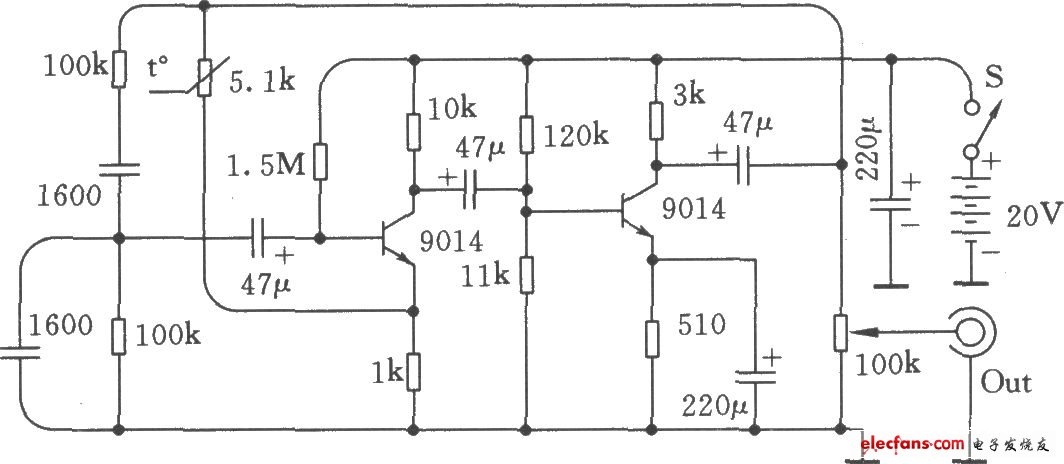
这里介绍的两个电路,性能都很好,适合自己动手制作。图中的两只100kΩ的电阻和两只1600pF的电容决定了RC串并联选频电路的振荡频率,计算公式为f=1÷(6.28×R×C)。图中RC电路选定的频率为

根据实物测绘出电气原理图如附图所示。该电路核心元件是一只十进制计数器(时序译码器)ICHEF4017BP(其⑩脚为供电端,⑧脚为接地端,⑩脚为脉冲信号输入端,⑩脚为复位端)、两只12v继电器和两只NP
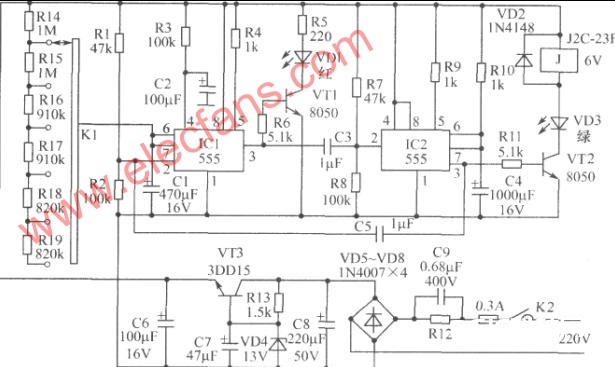
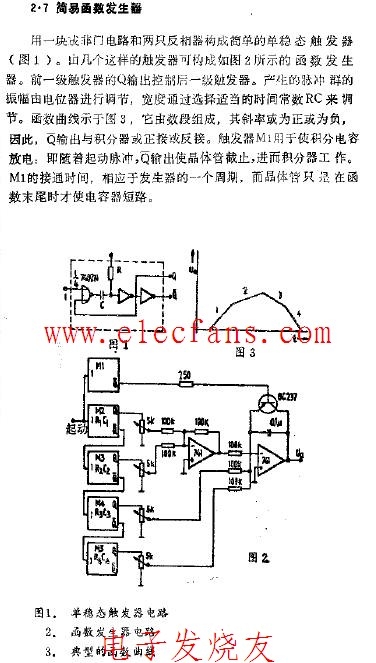
如图所示为鱼缸水泵自动开停控制电路。它采用两只555时基电路组成。其外围电路具有相似的结构,通过交连电容C5、C3形成闭环。该装置运行有两个状态:即工作状态和间歇状态。为了保证达到每次开启电源时装置处

输入信号放大整形电路对于输出幅度比较小的正弦波信号,要测量其频率大小,首先要进行放大整形,变换成同频方波信号。实现北功能的电路如图所示。信号首先经过两只二极管D1,D2进行输入嵌位限幅,然后通过两级三
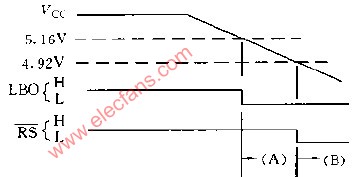
检测功能MAX714系列监视电源电压Vcc并输出两只电压下降信号,分两个阶段动作,如图所示,当Vcc下降低于5.16V时。LBO输出为低电平,这输出电平作为电压下降的早期告警信号,如图中A。若电压机械
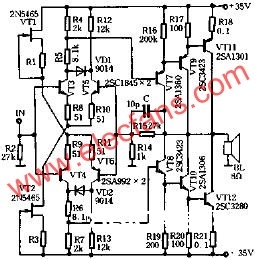
电路如图4-1所示。元器件的选择及安装要求与一般全互补对称功放一样。应注意的是,两只三极管应选用高频二极管,或用高频三极管的一个结代替。安装时必须把VT1、VT2与功放VT11、VT12进行热耦合,以

图中所示是用W317三端可调式正集成稳压器进行并联和F007运算放大器组成扩展电流输出的应用线路.由于采用外接功率管的方法降低稳定度,加大输入输出压差,电源效率会降低.而采用两只W317并联,既可扩展
