





西门子S7-300与S7-400PLC相互之间可以通过PROFIBUS-DP方式进行通讯。本文例子是一台CPU414-2DP作为PROFIBUS-DP通讯的主站,CPU315-2DP作为P

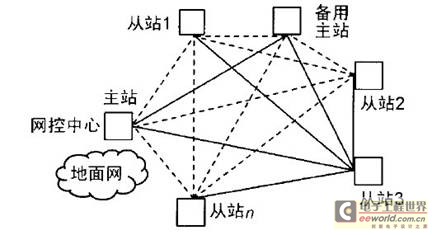
MF-TDMA卫星网络是由地面主站、备用主站、网控中心、众多从站、卫星转发器等单元组成,系统的主要业务是话音、数据、视频,但各卫通站通信能力大小不同,每个地面站作为主叫或被叫,向网控中心站申请卫星信道

设计了一种基于CANopen协议的救援机器人调试系统,设计中充分考虑了机器人运动关节的反馈数据优化控制参数,从而提高了运动关节控制性能。重点介绍了CANopen从站的软、硬件设计以及主站网络管理(NM
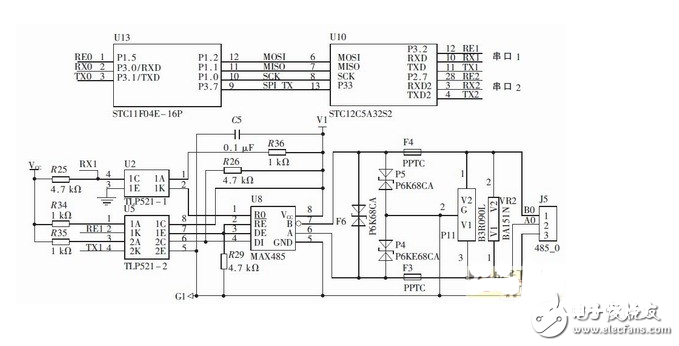
智能家居网关模块电路设计集锦-SCK、MISO、MOSI 分别是SPI 接口的时钟信号、主站输入信号、主站输出信号。定义STC12 的SPI 接口工作在从站方式,STC11 作为SPI 主站。
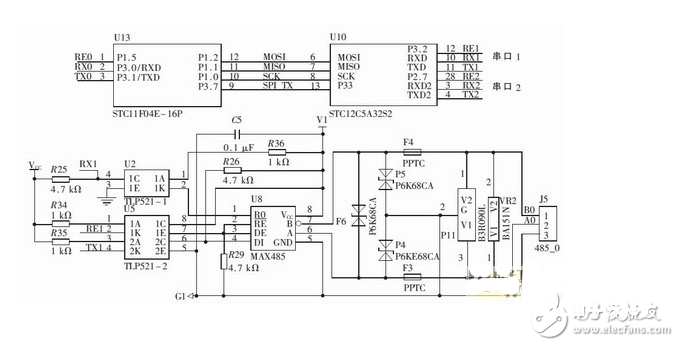
消防指示灯智能网关监控系统接口电路设计-SCK、MISO、MOSI 分别是SPI 接口的时钟信号、主站输入信号、主站输出信号。定义STC12 的SPI 接口工作在从站方式,STC11 作为SPI 主站
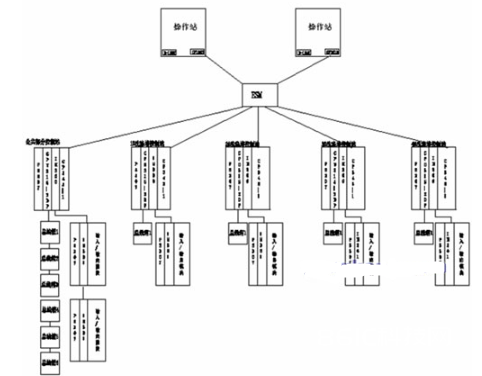
采用西门子S7-300系列PLC和总线技术实现高炉煤气洗涤控制系统设计-如果采用常规PLC集中控制方式,将现场信号通过电缆连接到集中控制室内的PLC上,由于工艺线路长、现场控制点分布范围广,需要敷设大量的电缆及桥架,且现场环境恶劣、其施工难度非常大。鉴于此,采用了PROFIBUS-DP现场总线技术,根据工艺划分,系统共设了五个主站、十个总线箱、两个操作员站。采用西门子的S7-300系列PLC,主站采用CPU315-2DP,其带有一个DP通讯口和一个MPI口。各总线箱采用通用性较好的ET200B和ET200eco现场模块,用于现场数据的采集和控制,并借助Profibus(工业现场总线),方便控制网络系统的建立。
