



PowerPC是一种RISC多发射体系结构。二十世纪九十年代,IBM(国际商用机器公司)、Apple(苹果公司)和Motorola(摩托罗拉)公司开发PowerPC芯片成功,并制造出基于P

Sun公司的Solaris系统能提供完整的端到端服务,Solaris建立在高端的SPARC CPU体系结构上,那是专为Solaris工作而设计的。其他的硬件改进,包括开发OpenBoot

PowerPC是一种RISC多发射体系结构。二十世纪九十年代,IBM(国际商用机器公司)、Apple(苹果公司)和Motorola(摩托罗拉)公司开发PowerPC芯片成功,并制造出基于P
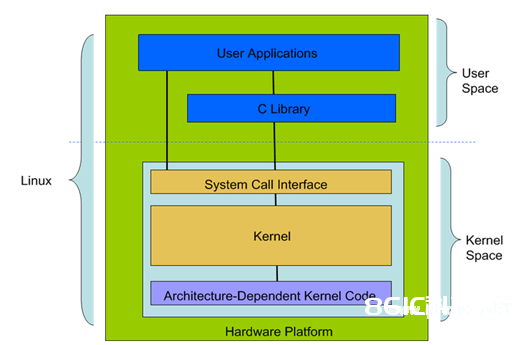
我并没有为arm体系结构的处理器移植uclinux操作系统,因为这方面的关键工作已经有人做完了。我只是让uclinux操作系统在恒坚ARM4510开发板上跑起来了。

1 前言目前,国内外的数控系统大多采用X86体系结构的CPU,主要是因为X86体系结构上拥有丰富的应用软件,开发环境和技术积累,可以在一定程度上缩短数控系统的开发周期.但X86体系结构也有其自身的缺点
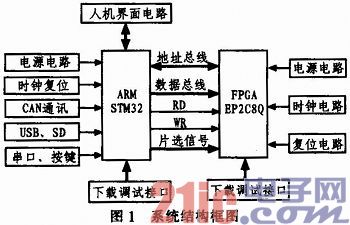
运用低功耗COrtex—M3微控制器STM32F103VBT6和FPGA芯片设计一种基于CAN总线的运动控制器。介绍系统的体系结构、主要硬件设计和软件结构。利用FPGA高速处理能力实现控制

文章罗列了关于ARM的22个常用概念。包括一些使用注意事项,ARM启动代码设计,ARM处理器运行模式,ARM体系结构所支持的异常类型和一些基本操作方法等等。1.ARM中一些常见英文缩写解释MSB:最高

Altera日前推出该公司第10代FPGA和SoC(芯片系统),Altera公司产品营销资深总监Patrick Dorsey表示,第10代器件在工艺技术和体系结构基础上都进行了优化,以最低功耗实现了
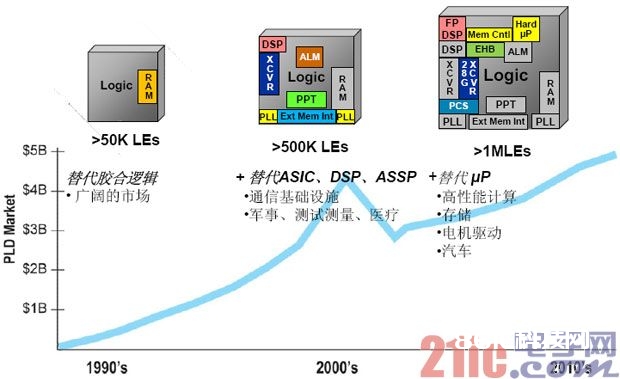
从1980年代中期问世以来,FPGA技术持续发展,应用范围不断拓展。近日,Altera公司资深副总裁兼首席技术官Misha Burich先生来京,介绍了FPGA体系结构的演进及Altera公司FPG
