


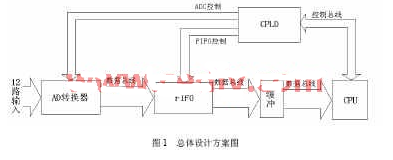
利用可编程逻辑控制器CPLD实现数据采集系统的总体设计-本文所介绍的数据采集系统是基于ARM的信号处理系统中的一部分,该信号处理系统用于导弹的数字式自动驾驶仪的开发研究中。整个系统由信号放大、信号滤波、信号采样、高速数字信号处理等部分组成。其中,数据采集系统是一个重要的环节,它的高速性和准确性直接影响到整个信号处理系统的性能。传统方法是应用CPU通过软件控制模数转换,这样必将频繁中断系统的运行从而减弱系统的数据运算能力,数据采集的速度也将受到限制。因此,本文利用可编程逻辑控制器CPLD,由硬件控制模数转换和数据存储,从而最大限度地提高系统的信号采集和处理能力。

Xilinx FPGA的同步复位和异步复位-对于xilinx 7系列的FPGA而言,flip-flop支持高有效的异步复/置位和同步复位/置位。对普通逻辑设计,同步复位和异步复位没有区别,当然由于器件内部信号均为高有效,因此推荐使用高有效的控制信号,最好使用高有效的同步复位。输入复位信号的低有效在顶层放置反相器可以被吸收到IOB中。
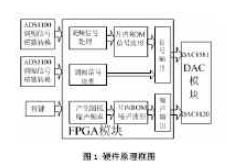
采用Cyclone系列EP1C6Q240C8 FPGA芯片实现振动模拟器的设计-振动模拟器的原理框图如图1所示,图中由ADC模块分别接收调频和调幅信号给FPGA模块,FPGA模块将串行的调频和调幅信号,经串并转换,分别变成一个16位的并行调频信号和一个16位的并行调幅信号。FPGA输出经调频调幅的数字的正弦波,并驱动串行DAC(输出理想信号)输出模拟的正弦波;用户通过按键确定想要产生的噪声的频率范围,FPGA经计算得到满足用户要求的频率,驱动并行DAC(输出噪声),产生模拟 •的噪声,经电流电压转换后由同相求和电路将信号与噪声相叠。
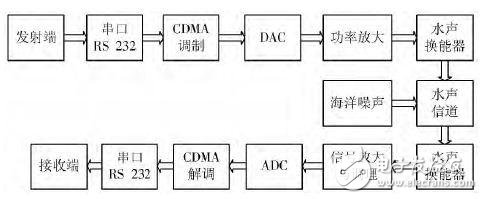
实现信号CDMA调制/解调的水声通信系统-任何信息需要借助声、光、电信 号进行传递,由于光信号和电信号在海水中的衰减比较严重,而声波是人类迄今为止已知的惟一能在水中远距离传播的能量形势,因此,近些年海洋中的水声通信系统的研究以及开发成了热点。
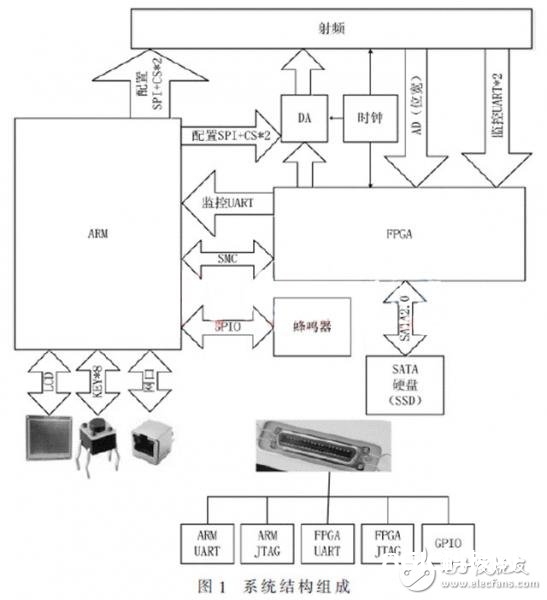
便携式GNSS导航信号采集回放系统,可编写针对K7型FPGA的SMC总线驱动-该系统的监控端采用了基于CortexA8系列的ARM处理器,该处理器同时兼顾了成本与性能的要求,可设计美观的图形化操作界面。该系统工作于BD2-B1和GPS-L1两个频点,便携性好,界面直观,可通过按键或触摸屏两种方式操作,同时可随时采集户外复杂环境下的导航卫星信号,极大地提高了导航接收机的开发效率和质量。
谈谈FPGA的在线调试工具-示波器是其中一种。但示波器只能观察到芯片IO上的信息,不能深入探测信号在逻辑内部是如何传递的。如果要探测内部的信号,就必须要修改设计,将内部信号引到IO上。
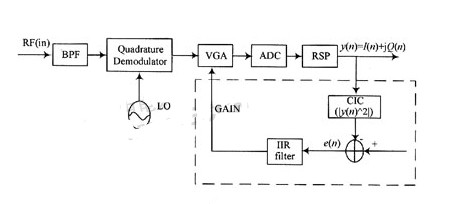
基于计算下的行同步码功率(SYNC_DL)模块-在本设计中,前端 TD_SCDMA 的射频信号 RF 输入后,经过 MAX2392 零中频下变频解调后进行增益处理。VGA 输出的信号经过 ADC 变换后就成为数字中频信号,经 RSP(接收信号处理器)处理输出为 IF 数字信号。IF 信号可以经过 AGC 控制算法处理后控制 VGA 的增益。AGC 增益控制算法在数字部分来实现,在本设计中,AGC 电路可以有效提高链路的动态范围(+25~-105 dBm),提高 ADC 输出的 SNR,以使 DSP 能更容易地实现 Dw-PTS 同步。AGC 在系统中的位置如图 1 虚线框所示:
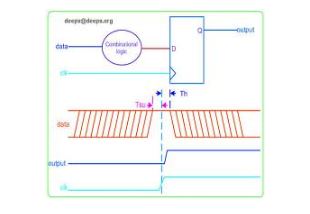
FPGA的时钟设计:如何建立时间与保持时间-时钟是整个电路最重要、最特殊的信号,系统内大部分器件的动作都是在时钟的跳变沿上进行, 这就要求时钟信号时延差要非常小, 否则就可能造成时序逻辑状态出错。
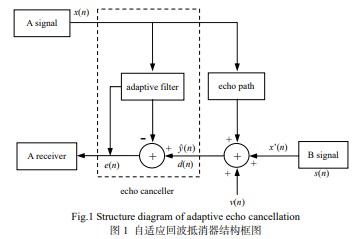
基于FPGA器件和DSP系统实现自适应回波抵消器的设计-在数字通信、卫星通信等系统中,不同程度的存在回波现象,影响了通信质量。为了消除回波可以采用回波抵消器,它能估计回波路径的特征参数,以产生一个估计的回波信号,然后从接收信号中减去该信号,以实现回波抵消。而一般采用自适应滤波器模拟回波路径,可以跟踪回波路径的变化。
