


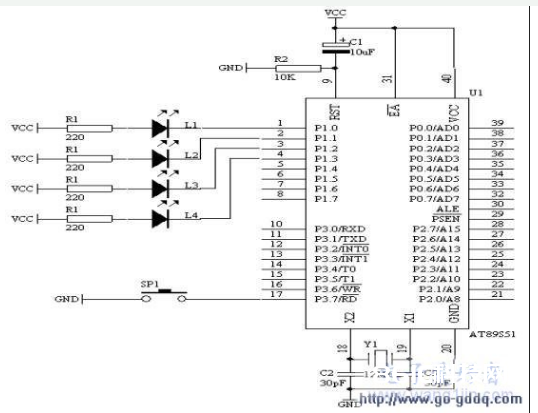
AT89S51单片机按键识别的过程和方法-一般情况下,我们可以采用电容来滤除掉这些干扰信号,但实际上,会增加硬件成本及硬件电路的体积,这是我们不希望,总得有个办法解决这个问题,因此我们可以采用软件滤波的方法去除这些干扰信号,一般情况下,一个按键按下的时候,总是在按下的时刻存在着一定的干扰信号,按下之后就基本上进入了稳定的状态。
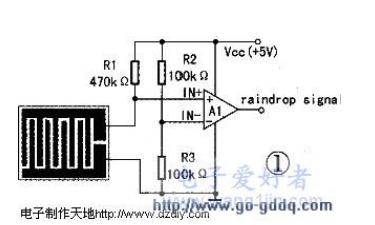
EM78447A单片机对智能晾衣架硬件电路的设计-单片机EM78447A接收来自传感器的信号后发出晾衣服架收缩或伸张功能的指令,使晾衣服架自动收缩或伸张,有效地避免在下雨时,衣服无人收起而被雨淋湿了,或在阳光强烈时,衣服没有被阳光充分地晾晒。同时,增加两个手动按钮,手动按钮的信号同样送至单片机EM78447A进行处理,用于晾衣服架收缩或伸张的手动控制。

STC89C51单片机对AD模数转换学习板的控制原理解析-ADC0809是采样频率为8位的、以逐次逼近原理进行模一数转换的器件。其内部有一个8通道多路开关,它可以根据地址码锁存译码后的信号,只选通8个模拟输入信号中的一个进行A/D转换。

8051单片机定时器溢出中断与CPU响应中断的时间误差分析-产生单片机定时器溢出中断与CPU响应中断的时间误差有两个原因。一是定时器溢出中断信号时,CPU正在执行某指令;二是定时器溢出中断信号时,CPU正在执行某中断服务程序。

51单片机的模拟开关设计-单片机对开关状态的检测相对于单片机来说,是从单片机的P3.0端口输入信号,而输入的信号只有高电平和低电平两种,当拨开开关K1拨上去,即输入高电平,相当开关断开,当拨动开关K1拨下去,即输入低电平,相当开关闭合。单片机可以采用JB BIT,REL或者是JNB BIT,REL指令来完成对开关状态的检测即可。
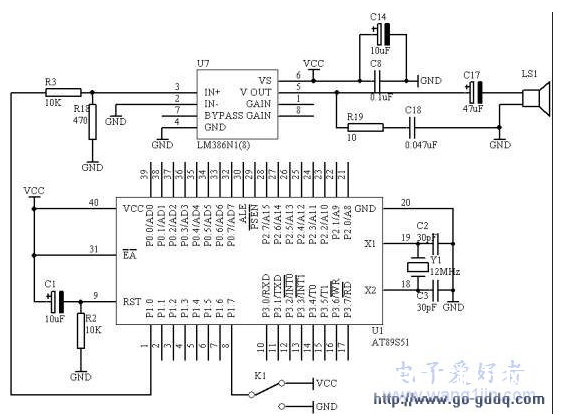
AT89S51单片机报警器的设计-用P1.0输出1KHz和500Hz的音频信号驱动扬声器,作报警信号,要求1KHz信号响100ms,500Hz信号响200ms,交替进行,P1.7接一开关进行控制,当开关合上响报警信号,当开关断开告警信号停止,编出程序。

单片机双机点对点通信设计-#define__MAX_LEN_64//数据最大长度
#define_MHz_11//设置单片机使用的晶振频率(11.0592MHz)
/*以下为程序协议中使用的握手信号*/
#define__RDY_0x06//主机开始通信时发送的呼叫信号
#define__BUSY_0x15//从机忙应答
#define__OK_0x00//从机准备好
#define__SUCC_0x0f//数据传送成功
#define__ERR_0xf0//数据传送错误
如何采用MSP430单片机实现PWM信号-PWM信号是一种具有固定周期、不定占空比的数字信号。
如果Timer_A的计数器工作在增计数模式,输出采用输出模式7(复位/置位模式)
利用寄存器TAxCCR0控制PWM波形的周期,用其他某个寄存器TAxCCRx来控制占空比(t高电平/ T周期)
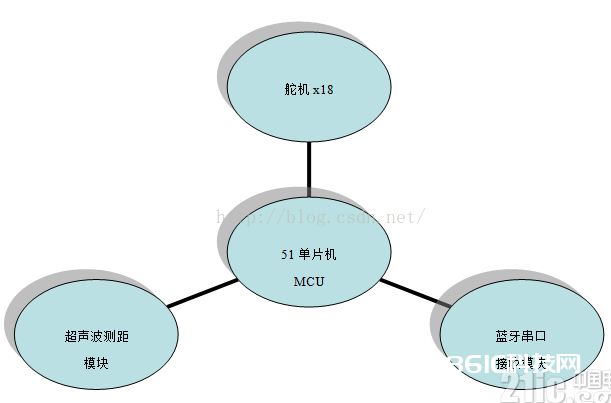
51单片机对六足机器人的控制设计-控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。舵机的控制信号周期为20MS的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0-180度,呈线性变化。

单片机采样模拟量数据的方法-单片机的ADC接口属于模数转换接口,将外部的模拟量信号转化为数字信号,单片机属于数字器件,需将模拟信号转化为数字信号才能够为单片机处理。目前市场的很多单片机都自带ADC转换接口,若无ADC转换接口,可以使用ADC数模转换芯片外扩。
