


自动驾驶技术中FPGA面临的挑战与实践-人工智能技术是自动驾驶的基础,算法、算力和数据是其三大要素。本文探讨的就是其中的“算力”。算力的高低,不仅直接影响了行驶速度的高低,还决定了有多大的信息冗余用来保障驾驶的安全。
采用复杂可编程逻辑器件实现双模冗余切换管理模块的设计-双模冗余控制器在具体实现上分有中心裁决器和无中心裁决器两种。有中心裁决器双模冗余是在两个控制器之外加入裁决电路,将两个控制器的输出先进行比较,结果相同才输出到背板总线上,裁决电路作为两个控制器的公用电路,一旦出现故障,则整个控制系统将无法继续工作。无中心裁决器双模冗余没有裁决电路,是在每个控制器上增加冗余切换管理逻辑,使得两个控制器在物理层面完全相互独立,任何一个控制器出现故障都不会影响到整个控制系统的正常运行。
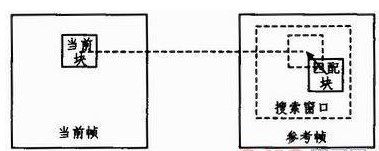
采用FPGA技术芯片模块实现运动估计的设计方案并进行仿真研究-运动估计主要是针对帧间预测,去除视频帧在空间域和时间域的冗余度。块匹配方法是目前编码效率较高,普遍采用的一种编码方法。首先,其要将当前帧进行划分。长期实践表明,将当前帧划分为多个16×16的块是比较合理的。其次,要根据划分出的当前块的具体情况,以及所采用的搜索方法来决定搜索窗口的大小。最后,要在所确定的搜索窗口里面,依据某种块匹配准则找到当前块的匹配块以及由匹配块到
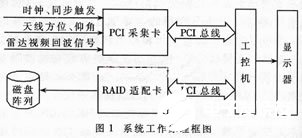
采用可编辑逻辑器件实现雷达信号采集存储系统的应用方案-实时流盘一直是数据采集技术的最大瓶颈,它直接制约了采集存储设备的实时存储能力。为此,可考虑利用多个硬盘组成RAID阵列(廉价冗余磁盘阵列)。RAID的初衷主要是为大型服务器提供高端的存储功能和冗余的数据安全。RAIID把多块独立的硬盘(物理硬盘)按不同方式组合起来形成一个硬盘组(逻辑硬盘),从而提供比单个硬盘更高的存储性能,提供冗余的技术。
基于三重冗余惯性传感器而设计的OpenRTK330接收器介绍-OpenRTK330内置的多频段RTK/GNSS接收器,可与冗余惯性传感器相结合,在GNSS中断期间仍旧保持厘米级精度。其集成的IMU系统,让自动驾驶系统开发工程师在合理的预算范围内最大程度地提高车辆的定位准确性,从而达到性能与成本的最高性价比。
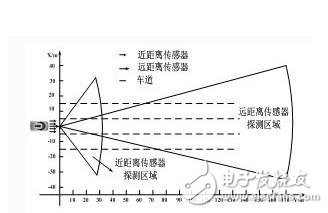
基于汽车雷达网络系统的构成及工作原理解析-要想完全解决好雷达的误报问题,还需要采取多传感器之间的信息融合技术。通过将各种雷达传感器集成在一起构成的一个网络系统综合了各种传感器的优势,实现了信息分析、综合和平衡,利用数据间的冗余性和互补特性进行容错处理,克服了单一传感器可靠性低、有效探测范围小等缺点,有效地降低了雷达的误报率。由此构成的新的、高精度的传感器网络,能够极大地改善汽车雷达网络系统的性能。

1.CRC校验原理1.1 CRC的基本概念:CRC是英文Cyclical Redundancy Check的缩写,翻译成中文通常称作循环冗余校验或简称为CRC校验。它是数据传输领域中最常用的


WAGO工业以太网交换机–高度的过程可靠性确保压缩空气供应,宝马集团雷根斯堡工厂的压缩空气中心表明,WAGO的工业以太网交换机在冗余环网中保证高度的可靠性。 WAGO的工业以太网交换机在系统网络冗余
