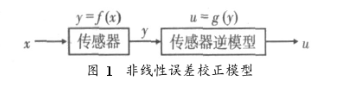
利用LS-SVM回归算法辨识模型参数实现传感器非线性校正的研究-大多数传感系统都可用y=f(x),x∈(ξa,ξb)表示,其中,y表示传感系统的输出,x表示传感系统的输入,ξa,ξb为输入信号的范围。y信号可经过电子设备进行测量,但通常是根据测得的y信号求得未知的变量x,即表示为x=f-1(y)。但在实际应用过程中,绝大多数传感器传递函数为非线性函数。

本站为您提供的电位器的其他特性参数,电位器的其他特性参数
1.符合度
符合度又叫符合性,它是指电位器的实际输出函数特性和所要求的理论函数特性之间的符合程度。它用实际特性和理论特性之间

本站为您提供的电位器的其他特性参数,电位器的其他特性参数
1.符合度
符合度又叫符合性,它是指电位器的实际输出函数特性和所要求的理论函数特性之间的符合程度。它用实际特性和理论特性之间
本站为您提供的集成函数发生器8038的工作原理,8038管脚图,集成函数发生器8038的工作原理,8038管脚图
前面讨论了由分立元器件或局部集成器件组
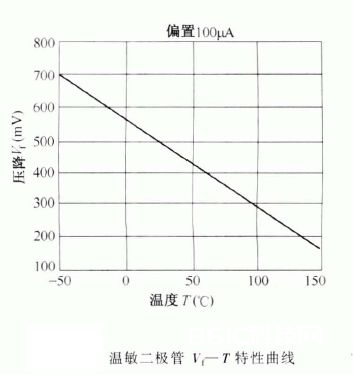
本站为您提供的温敏二极管的特性,温敏二极管的特性
通过对半导体二极管的分析可知,在一定偏置电流下,半导体二极管PN 结的压降是温度的函数,这个函数的曲线近似为直线。用于测温的温敏二极管