



52单片机对智能小车的控制设计-在小车的机械要求保证预定的功能的前提下,我们还考虑到小车的经济、可靠、外形美观,性能好、富有时代特点。
转向机构与驱动系统的设计是至关重要的。为了保证小车转向时精确、灵敏、可靠性高且在转向时小车前轮纯滚动而无滑动,利用阿克曼原理及解析算法,设计出等腰梯形的双摇杆机构,小车的完美转向变为现实。

简单讲解汽车四轮定位仪中的倾角传感器-汽车四轮定位 从汽车的构造说,汽车的转向车轮(前轮)、转向节和前轴三者之间的安装具有一定的相对位置,这种具有一定相对位置的安装叫做转向车轮定位,也称前轮定位。
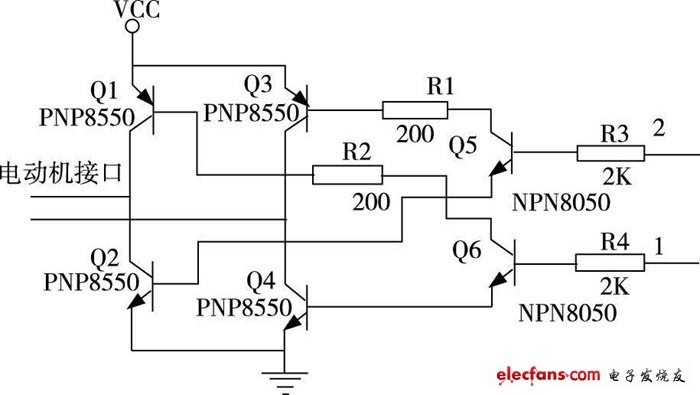
智能小车驱动电路是一个全桥驱动电路,Q1,Q2,Q3,Q4四个三极管组成4个桥臂,Q5控制Q2和Q3的导通和关断,Q6控制Q1和Q4的导通和关断,驱动电路分别用于后轮动力驱动电路和前轮方向驱动电路。当

美国通用汽车在“SAE2008WorldCongress”以混合动力车为中心。除了展示该公司首款前轮驱动混合动力车2009款“SaturnVueGreenLine”外,还展示了燃料电池车“EQUINO

日产汽车为“JUKE”追加了配备有涡轮增压发动机“MR16DDT”的车型,已于2010年11月2日上市(图1)。前轮驱动款为“16GT”,四轮驱动款为“16GTFOUR”。图1:日产“JUKE16GT
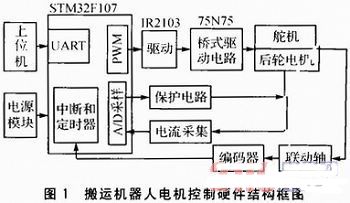
针对搬运机器人的前轮转向舵机和后轮驱动电机的控制要求,采用以Cortex-M3为内核的STM32F107作为主控制器,采用嵌入实时操作系统μC/OS-II,将程序分成启动任务、电机转速控制任务、舵机控

基于STM32F107的搬运机器人电机控制电路设计-随着人工成本的不断升高,用机器人代替人力去做一些重复性的高强度的劳动是现代机器人研究的一个重要方向。搬运机器人在导航寻迹中,需要后轮驱动电机和前轮舵

简单讲解汽车四轮定位仪中的倾角传感器-汽车四轮定位 从汽车的构造说,汽车的转向车轮(前轮)、转向节和前轴三者之间的安装具有一定的相对位置,这种具有一定相对位置的安装叫做转向车轮定位,也称前轮定位。
