



PIC单片机的程序编写和空间分配时应注意哪些问题-控制部分采用PICl6F7X系列单片机,运用汇编语言编程,运行速度较快,能够达到系统的要求。在这里使用的大多是数字信号的控制,电机的控制只有开和合两种状态。在动作的过程中需要两只手臂、身体、头部、脚部等的协调动作。
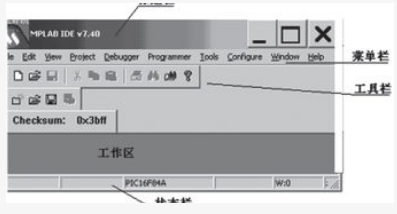
PIC单片机程序编写和动作标志位的使用方法解析-在这里使用的大多是数字信号的控制,电机的控制只有开和合两种状态。在动作的过程中需要两只手臂、身体、头部、脚部等的协调动作。整个控制系统比较复杂,因而在PIC程序编写和空间分配方面需要注意一些问题。

欧姆龙开发出可识别手部动作的“手势识别技术”-欧姆龙宣布开发出了可识别手部动作的“手势识别技术”,可同时识别手部或手指的位置、形状及动作。据介绍,该技术可用于利用手势操作电视及个人电脑等用途。




所谓线程(Thread) 是指一串连续的执行动作,以达成一项目的。电脑内部都有数串连续性的动作同时在进行。也就是有多条线程并行地 (Concurrently)执行。在
摘要:介绍以P87LPC764型单片机为核心的延时型漏电继电器设计方案。该方案可供用户选择实现额定动作电流和5倍额定动作电流下不同的延时动作时间,并有重合闸设定选择功能。解决了以往传统分立元件带来的延
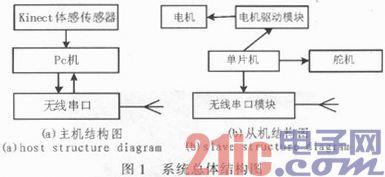
摘要:设计一款可以通过人体动作对机器人进行控制的机器人控制系统。该系统由主机和从机两部分组成,通过Kinect体感传感器采集人体动作信息,在主机中进行图像处理解析出相应的人体动作,然后通过无线传输单元
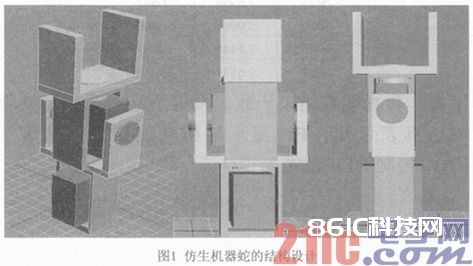
摘要:文章主要描述仿生机器蛇的设计,包括机器蛇的结构设计和运动规划连贯动作的实现。通过对蛇形机器人在有障碍物和无障碍物环境中,进行不同连贯动作的运动规划和运动形式变化,找出机器人设计的不同侧重点;最后
