


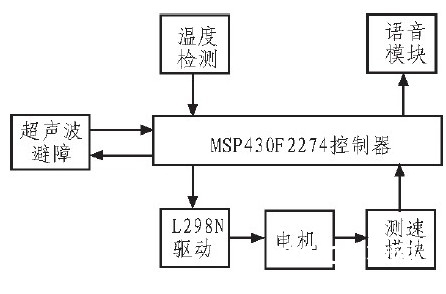
基于MSP430F2274单片机对智能小车的应用设计-该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。
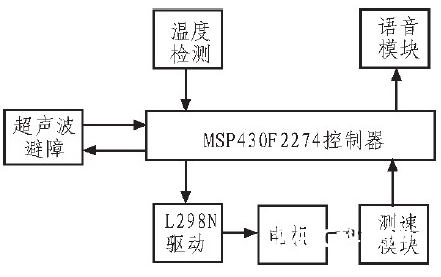
MSP430单片机对智能小车的硬件控制设计-该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。

目前,医院输液现场一般是人工控制和监视,但输液速度和输液量是一个很难准确把握的值,护士通过转动输液器上的手动轮来控制输液速度,并通过肉眼观察估计速度,而且输液过程中,医护人员一般不能全程陪护,会给病人

基于ARM处理器和CPLD技术实现智能移动机器人系统设计-该系统设计的轮式移动机器人机械导航结构采用四轮差速转向式的机械机构,前面两个轮是随动轮,起支撑作用,后面两个轮是驱动轮,由两台同步电机驱动,分别控制两个驱动轮的转速,可使机器人按照不同方向和速度移动,运动灵活,可控性好。
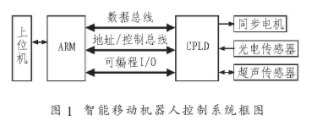
基于ARM处理器和CPLD技术实现智能移动机器人系统设计-该系统设计的轮式移动机器人机械导航结构采用四轮差速转向式的机械机构,前面两个轮是随动轮,起支撑作用,后面两个轮是驱动轮,由两台同步电机驱动,分别控制两个驱动轮的转速,可使机器人按照不同方向和速度移动,运动灵活,可控性好。
