


关于红外线遥控接收控制电路原理(M491 )-M491是红外线遥控接受微处理器,主要应用 在电视机领域,具有双层晶硅nmos制造技术,并且可以存储16个预选节目信息,带有微调功能。
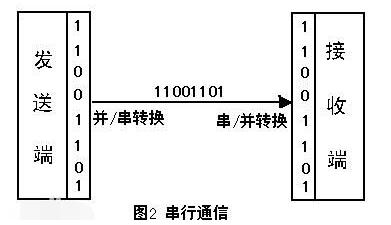
深入理解51单片机串口通信及通信实例-全文首先阐述了串口通信的原理及RS232相关概述,其次介绍了USB转串口通信与IO口模拟UART串口通信,最后介绍了51单片机串口通信实例。
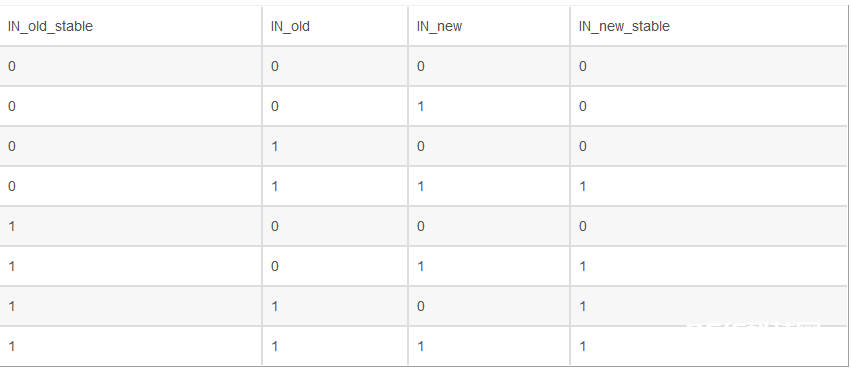
简谈单片机检测按键原理和中断按键检测的办法-首先说一下独立键盘检测,在单片机外围电路中 ,通常用到的按键都是机械弹性开关,当开关闭合时,线路导通,开关断开时,线路断开。单片机检测按键的原理:按键的一端接地,另一端与单片机的某个I/O口相连,开始先给I/O赋一高电平,然后让单片机不断检测该I/O口是否变为低电平,当按键闭合时,相当于I/O口与地相连,就会变为低电平。

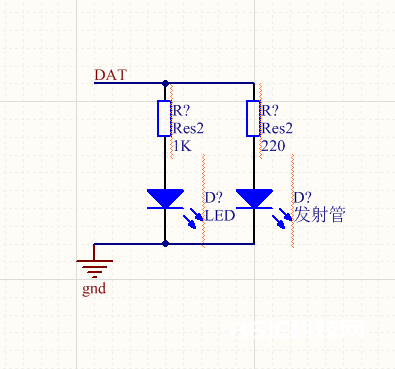
STM32F103试用体验(四):硬件原理与机壳组装-机壳做好了,使用的椴木层板做材料,激光切割而成,开始组装之前先来介绍一下硬件原理。 这是组装之后的整体效果图 硬件原理 测速使用的两对红发收发管,当飞行的物体依次经过两个监测点的时候,分别记录时间,然后通过距离、时间计算出物体的速度。 红外发射板原理图 红外接收板原理图 壳体组装 材料全貌 传感器灵敏度调试 下面是检测灵敏度调节的一段视频,大概20S。灵敏度调节到能检测一根头发丝通过的程度。调试的时候观察LED是不准确
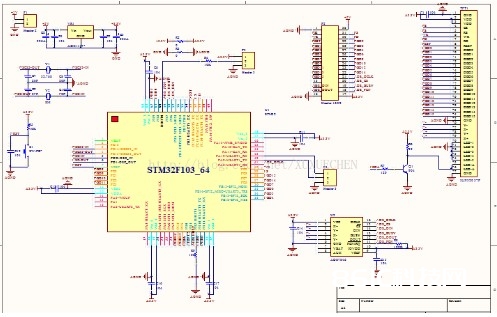
STM32单片机ILI9325系列TFT的驱动原理解析-为了更好,更深入学习了解ILI9325系列TFT的驱动原理,自己做了一块TFT板子。为了方便测试,在上面集成了STM32芯片,到时候做实验的时候就焊接STM32测试,如果只是使用,就直接焊接TFT就行了。板子还在做,先上原理图与PCB。
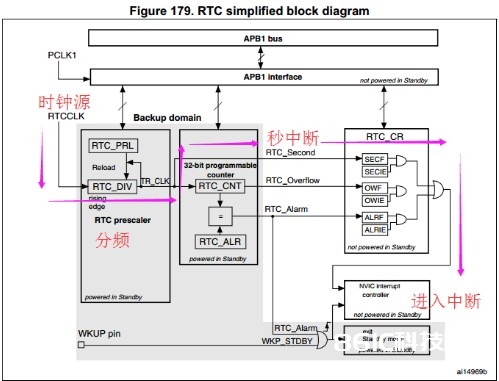
STM32单片机中RTC的秒中断的原理解析-RTC(Real Time Clock)是实时时钟的意思,它其实和TIM有点类似,也是利用计数的原理,选择RTC时钟源,再进行分频,到达计数的目的。
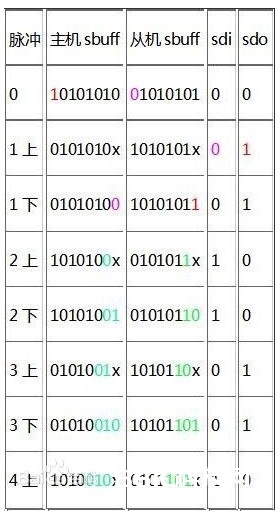
STM32单片机SPI的使用原理解析-GPIO_InitTypeDef GPIO_InitStructure;
//配置SPI2管脚
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 |GPIO_Pin_14| GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
