


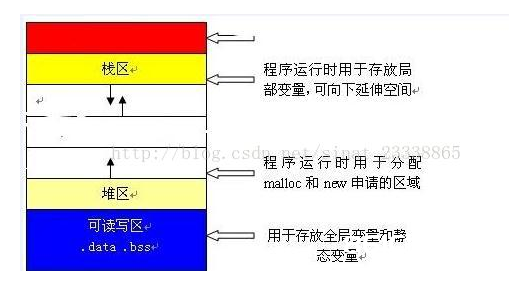
浅谈变量在MCU中存储位置-全局区(静态区)(static)—,全局变量和静态变量的存储是放在一块的,初始化的全局变量和静态变量在一块区域, 未初始化的全局变量和未初始化的静态变量在相邻的另一块区域。 – 程序结束后有系统释放

51单片机结构的C的常见错误有哪些-C51的一些误区和注意事项 1)C忌讳绝对定位。常看见初学者要求使用_at_,这是一种谬误,把C当作ASM看待了。在C中变量的定位是编译器的事情,初学者只要定义变量和变量的作用域,编译器就把一个固定地址给这个变量。怎么取得这个变量的地址?要用指针。比如unsigned char data x;后,x的地址就是x, 你只要查看这个参数,就可以在程序中知道具体的地址了。所以俺一看见要使用绝对定位的人,第一印象就是:这大概是个初学者。

关于STM32局部变量问题 数组过大,栈溢出了怎么办-当在一个函数中声明一个较大的局部 数组 变量时,程序可以编译通过,但运行时,老是进入hardfaulthandler,导致出现改问题的原因可能是栈溢出。因为 局部变量 是存放在栈区的,而全局变量在全局区(静态区),如果栈区较小,会产生溢出。 解决这种问题的方法: 方法1:启动文件里面对栈的大小有固定的值。

十大单片机编程技巧分享-1.定义的变量不要太多。低128位为用户定义变量的存放区域(默认时),也可以把变量放在高128位,但容易出错,尽量少放,最好不放。通过M51可以查看内存变量的存放,最好不要超过110个字节,否则程序无法运行或出错。

基于PIC16F630的I/O口对流水灯的控制-//看门狗关;内部RC振荡,RA4/RA5做I/O,MCLR脚做复位
//————————————
//延时函数
voiddelay()
{
inti;//定义循环变量
for(i=5000;i》0;i–)//循环次数控制
{
NOP();//消耗一个指令周期时间
NOP();
}
}
//————————————

AVR单片机c程序设计编程时常见的问题总结分析-1.int (*func)(void)–基本函数指针变量定义方式,变量func是一个指向返回值为int,没有参数的函数指针,这与其他变量定义有点区别,一般是把变量名放最后,如int a,而函数指针比较不直观,
2.typedef int(*ftype)(void); ftype func;–类型重定义方式,先定义一种新的类型ftype,它是一种指针类型,这种类型专门指向返回值为int,没有参数的函数,再通过该类型定义一个具体的变量func
3.func=functionName–函数指针赋值,functionName为已经定义的函数的函数名

C51单片机中定义一个全局变量会有怎样的影响-全局变量被定义在内存中的专门地址上,存储位置固定。对于频繁存取的重要变量但可以采用全局变量以减少代码的长度;由于全局变量总是占用内存,如果过多,或者把程序处理和计算中的一些中间变量也定义为全局变量,将大大消耗内存空间,处理速度会变慢,同时数据安全性也会降低。

如何测试单片机的数据类型字节数-i = sizeof(char);//char是一字节的变量
if(i == 1)
{
led0 = 0;
}
i = sizeof(int);
if(i == 2)//led等亮,测试int是两字节的变量
{
STM32单片机的系统定时器初始化设置-#include“stm32f10x_lib.h”
unsigned char sys_nub;//系统定时器中断计数变量
//SysTick 设置
void Systick_Config(void)
{
//失能SysTick定时器
SysTick_CounterCmd(SysTick_Counter_Disable);
//失能SysTick中断
SysTick_ITConfig(DISABLE);
Keil C51单片机变量的使用方法详细介绍-8051内核单片机是一种通用单片机,在国内占有较大的市场份额。在将C语言用于51内核单片机的研究方面,Keil公司做得最为成功。由于51内核单片机的存储结构的特殊性,Keil C51中变量的使用与标准C有所不同。正确地使用变量,有利于获得高效的目标代码。下面详细介绍Keil C51中变量的使用方法。
