




vxWorks提供了一个用户接口usrAppInit。我们可以根据需求来实现或者改写这个函数,对应的usrAppInit.c在已创建的VIP目录下。VIP编译的过程中这个函数将被编


现场可编程门阵列(FPGA)作为专用集成电路(ASIC)领域的一种半定制电路,可以根据设计的需要灵活实现各种接口或者总线的输出,在设备端的通信产品中已得到越来越广泛的使用。FPGA 是基于静态随机存

摘要:智能循迹小车可以根据前端摄像头的输入图像识别出道路状况,通过优化智能车的软硬件设计,能够确保其在不同环境下行驶的快速性和准确性,本文以Kinetis60为核心处理器,完成了智能车路径检测、速度检
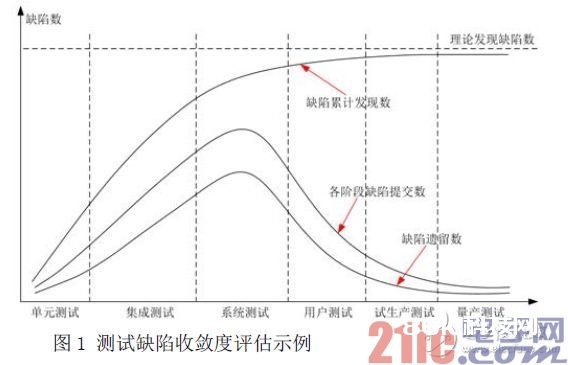
测试阶段过程中需要进行测试文档评审和缺陷管理,这不仅可以提高测试效率,而且在项目管理中项目经理可以根据缺陷收敛趋势平衡产品质量、项目进度与成本三者关系。在测试用例设计时,需要关注逆向测试用例和可靠性测
图给出国产(深圳华为)变频器的原理图。图中各组成部分名称已经标出,DSP是微机编程器。利用变频器可以根据电机负载的变化实现自动、平滑的增速或减速,基本保持异步电机固有特性转差率小的特点,具有效率高、范
