


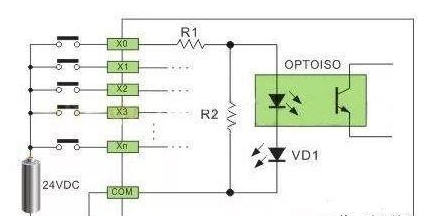
关于传感器与PLC的接线解析-目前 PLC 数字量输入端口一般分单端共点与双端输入,由于有区别,用户在选配外部传感器时接法上需要一定的区分与了解才能正确使用传感器与 PLC 为后期的编程工作和系统稳定奠定基础。
基于模糊控制和QR码的精确定位方法设计详解-自动引导车(Automated Guided Vehicle,AGV)是现代物流行业的高效运输工具。但是,在AGV运行过程中,导航定位精度差,一直制约其在许多工业环境下的应用。提出一种最优偏差路径的AGV纠偏方法,可以实现5 mm范围内纠正,但是系统鲁棒性较差。采用了一种基于惯性导航和视觉里程计的定位算法,实现视觉辅助定位,克服惯性导航的不足,但是仍然无法实现后期AGV的位置修正;采用自定义定位标识符法,在地面铺设停车标识,系统识别停车标志符后,即根据直线运动公式计算AGV停车距离,直至距离为0,但后期缺少视觉信息反馈,不具备停车纠偏能力。



STM32本身没有自带EEPROM,但是STM32具有IAP(在应用编程)功能,所以我们可以把它的FLASH当成EEPROM来使用,同时,开发者为了维护后期的版


电子设计自动化(EDA)的实现是与CPLD/FPGA技术的迅速发展息息相关的。CPLD/FPGA是80年代中后期出现的,其特点是具有用户可编程的特性。利用PLD/FPGA,电子系统设计工程师可以在实验
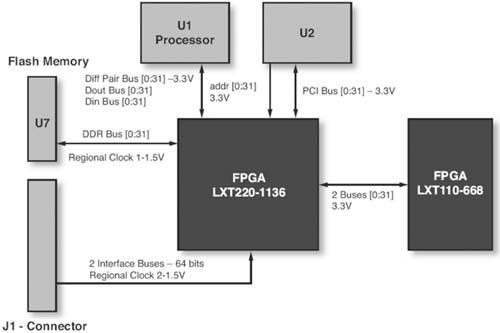
赛灵思公司开发了一种规则驱动的方法。首先根据PCB和FPGA设计要求定义一套初始引脚布局,这样利用与最终版本非常接近的引脚布局设计小组就可以尽可能早地开始各自的设计流程。 如果在设计流程的后期由于PC
