


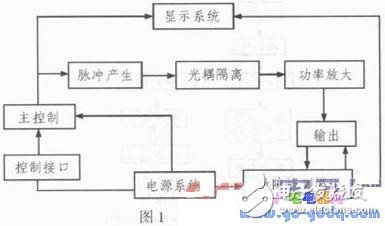
便携式机车速度信号发生器设计- 程序思路为:先由设定的速度和轮径,通过计算得出车轮转速,由车轮转速计算得出需要信号的周期,并对周期加以分析,通过特定参数对周期修正,得出需要的频率,最后配置定时器在I/O口输出对应的脉冲信号。
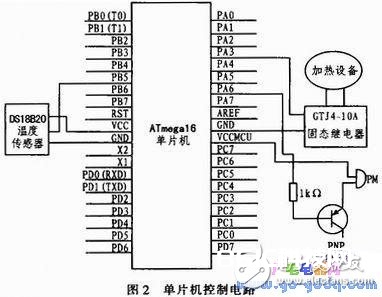
基于AVR单片机与温度传感器相结合的实时温度控制-ATmega16是基于增强的AVR RISC结构的低功耗8位CMOS微控制器。由于其先进的指令集以及单时钟周期指令执行时间,ATmega16的数据吞吐率高达1 MIPS/MHz,从而可以减缓系统在功耗和处理速度之间的矛盾。ATmega16AVR内核具有丰富的指令集和32个通用工作寄存器。所有的寄存器都直接与运算逻单元(ALU)相连接,使得一条指令可以在一个时钟周期内同时访问两个独立的寄存器。这种结构大大提高了代码效率,并且具有比普通的CISC微控制器最高至10倍的数据吞吐率。因此可以很好进行数据传送以及对继电器的控制和温度的采集。


AVR单片机的特点及缺点解析-AVR单片机指令以字为单位,且大部分指令都为单周期指令。而单周期既可执行本指令功能,同时完成下一条指令的读取。通常时钟频率用4~8MHz,故最短指令执行时间为250~125ns。


基于通过寄存器和调用库函数的方式,对比测试STM32读写IO时间-通过在线调试的方式,可以看出1条C语句:GPIOA -> BSRR = 1<<3;//PA3输出高电平 对应3条汇编指令:MOVS r0,#0x08 ;把立即数0x08传送给寄存器r0 LDRr1,[PC,#8] ;从地址(PC+8)处读取一个字到寄存器r1 STRr0,[r1,#0x00] ;把r0中的低字节存储到地址(r1+0)处 由于Cortex-M3的大部分汇编指令均为单周期指令,理论上PA3输出高电平为3个时钟周期, 即3*(1/72)us = 42ns,经示波器实测输出高电平时间约为:42ns左右。

基于stm32单片机利用通用定时器输出PWM-第一步:开启时钟使能
RCC-》APB1ENR:1 位 //开启定时器3 时钟使能
第二步:设置定时器分频与装载计数值(以一周期 1ms)
TIM3-》PSC = 7199; //系统时钟为 72M 经 (7199+1) 分频后,定时器时钟为 10k(一周期为0.1ms)
TIM3-》ARR = 9; //计数周期为 0.1ms * (9+1) = 1ms
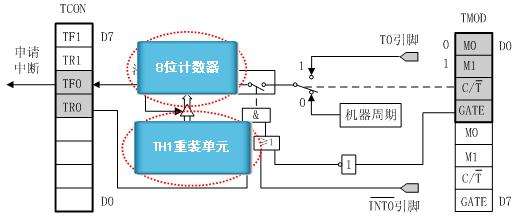
单片机中的定时器与计数器有何不同,二者的区别是什么-定时器实际上也是工作在计数方式下,只是计数的是固定周期的脉冲,由于脉冲周期固定,由计数值可以计算时间,有定时功能。
定时和计数只是触发来源不同(时钟信号和外部脉冲)其他方面是一样的。

基于PIC16F630的I/O口对流水灯的控制-//看门狗关;内部RC振荡,RA4/RA5做I/O,MCLR脚做复位
//————————————
//延时函数
voiddelay()
{
inti;//定义循环变量
for(i=5000;i》0;i–)//循环次数控制
{
NOP();//消耗一个指令周期时间
NOP();
}
}
//————————————

基于msp430单片机定时器的使用方法解析-通过计算设置周期。
#include
void main( void )
{
// Stop watchdog timer to prevent time out reset
WDTCTL = WDTPW + WDTHOLD; //WDTCTL = 0X5A80;关狗
CCTL0 = CCIE; //使能CCR0中断
CCR0 = 4095; //设置周期为0.5s
