


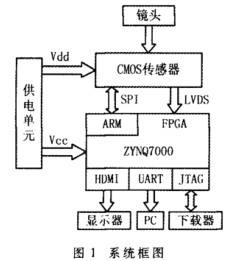
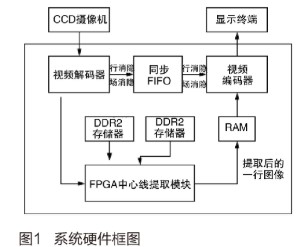
基于FPGA ZYNQ7000的高帧频智能目标检测系统的设计方案-高速相机一般通过GigE、Camera Link、USB3.0等接口将图像采集后传输到图像处理器上,这种方式把大量时间消耗到信息传输通道。为了解决这个问题,最好的方式是直接在近端对传感器芯片采集的图像进行处理。FPGA凭借其硬件并行运算的优势,越来越多地应用于高速相机以及高速运动检测系统中,极大地提高了图像处理速度,保证了系统的高速、实时性与准确性。通过FPGA对图像传感器进行近端处理,可以做到采集图像与智能处理同步进行。其最需要解决的问题是优化智能算法,使得运算更加简单高效,并占用更少的资源。

Xilinx赋能深维科技GIF2WebP动图方案重新定义图像处理未来-Xilinx® Alveo™ U200加速卡助力深维科技 (DeePoly)ThunderImage转码解决方案提供创新的多媒体演示体验。
中值滤波的原理和快速算法及利用FPGA技术实现-现代图像处理系统对实时性的要求愈来愈高,但图像的前端采集往往会受器件或环境影响而使获得的图像含有噪声,因而需要在对图像处理前进行去噪声处理。若使用通用的软件方法,由于处理过程需要进行大量的简单计算,因此会消耗不少时间而影响系统的实时性。随着现代电子技术的发展,用FPGA来完成中值滤波这类运算简单但数据量巨大的处理,无疑是一种理想的选择。
三维图像处理系统组成及实现方案-激光带预处理算法的实现[2]为:由于有激光帧和无激光帧是依次交替产生的,因此首先要保存一帧有激光帧,在其下一帧,即无激光帧到来时,将保存的有激光帧和当前无激光帧的相同行、列的点相减,再对结果进行亮度提取,处理完成后的数据存入目标缓存。
关于利用FPGA做图像处理的相关知识盘点-用FPGA做图像处理最关键的一点优势就是:FPGA能进行实时流水线运算,能达到最高的实时性。因此在一些对实时性要求非常高的应用领域,做图像处理基本就只能用FPGA。例如在一些分选设备中图像处理基本上用的都是FPGA,因为在其中相机从看到物料图像到给出执行指令之间的延时大概只有几毫秒,这就要求图像处理必须很快且延时固定,只有FPGA进行的实时流水线运算才能满足这一要求。
基于XC2V2000和TMS320C6414芯片实现实时红外图像处理系统的设计-红外热成像技术在军事领域得到广泛的应用。但是通常的热成像系统的瞬时视场都很小,为了扩大视界通常采用光机扫描机构,扫描机构的引入使得系统结构复杂化。而且由于扫描速率的限制,容易造成目标动态信息的丢失。随着红外广角镜头的出现,克服了光机扫描的缺点。此时,实时超大视场红外图像处理成为目标检测、目标识别和目标跟踪的关键技术。
基于视频速度应用在FPGA上实现的结构光中心线提取算法-随着测控技术及数字图像处理技术的高速发展,基于三角法线结构光的三维测量具有高精度、非接触、实时性和强主动受控性的特性,因此在现实中有广泛的应用,尤其是在计算机视觉、医疗诊断和工业检测等领域应用价值日渐增强。在结构光检测系统中,利用CCD相机以及工业相机摄取用线结构平面激光照射照在物体表面形成的光条纹中心信息,然后根据光条纹中心偏移量进行三维定标,这样可以得到物体表面的各类信息,比如表面的缺陷以及形变等。有鉴于此,线结构光条中心信息的图像处理在测量过程中就显得十分关键。虽然目前结构光中心线的提取方法有许多种,比如:阈值法、极值法、灰度重心法、方向模板法、Hessian矩阵法等,这些方法都有各自的优缺点以及一定的应用范围。基于数字图像处理的特点是处理的数据量非常大,处理非常耗时
基于Zynq的HDMI传输和相关IP核介绍-为了简化编码解码器和PL之间的集成复杂度,这里介绍两个AVNET所开发的IP核,可通过Avnet GitHub下载( github.com/Avnet/hdl/tree/master/IP )。在图像处理链中,可以把它们放在处理链的最前端和最后端来连接外部的编解码器。
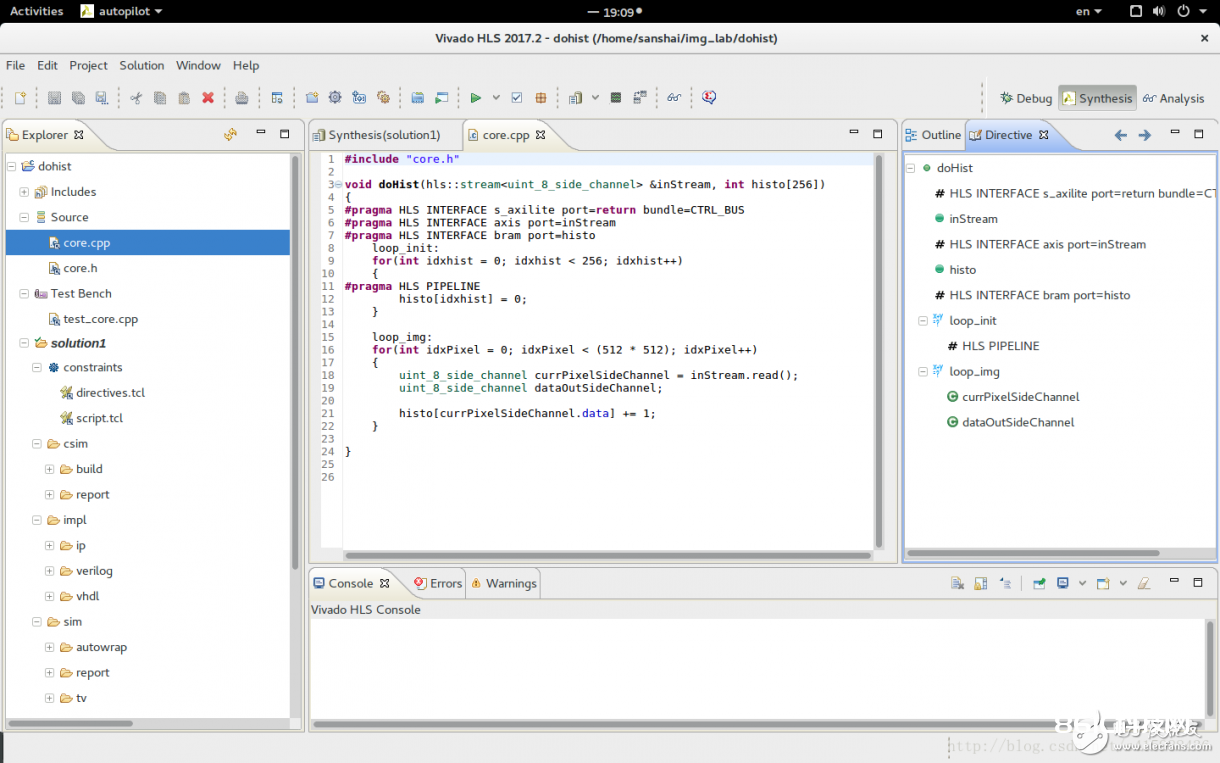
基于FPGA的简单图像处理程序,可实现两个功能-首先编写相应的C/C++语言程序,加入到Vivado HLS工程中,再编写相应的testbench代码进行编译测试。
机器视觉和智能图像处理技术之间的关系-机器视觉(Machine Vision)是人工智能领域中发展迅速的一个重要分支,目前正处于不断突破、走向成熟的阶段。一般认为机器视觉“是通过光学装置和非接触传感器自动地接受和处理一个真实场景的图像,通过分析图像获得所需信息或用于控制机器运动的装置”,可以看出智能图像处理技术在机器视觉中占有举足轻重的位置。
