说在前面,很早时,android就开始有支持单点手势(单点触控),到android2.2开始支持多点触控.不同的动作序列合起来表示不同的手势。比如Fling手势包括三个
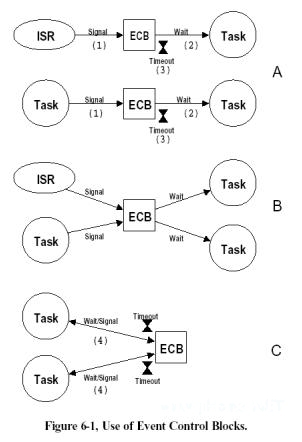
在μC/OS-II中,有多种方法可以保护任务之间的共享数据和提供任务之间的通讯。在前面的章节中,已经讲到了其中的两种:一是利用宏OS_ENTER_CRITICAL()
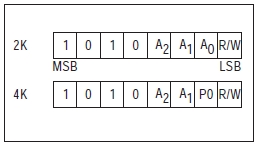
在前面阅读理解了I2C的官方协议文档后,就拿s3c2440和EEPROM来验证一下.本来是想用s3c2440的SDA和SCL管脚复用为GPIO来模拟…

在前面的示例中,已经用到了LPC1114的GPIO端口。GPIO端口是CPU与外部设备打交道的基础,为了更好地运用好它,下面将对LPC1114的通用输入输…

在前面的课程中我们已经了解到了不少关于时钟的概念,比如我们用的单片机的主时钟是11.0592M、I2C总线有一条时钟信号线SCL等,这些时…