


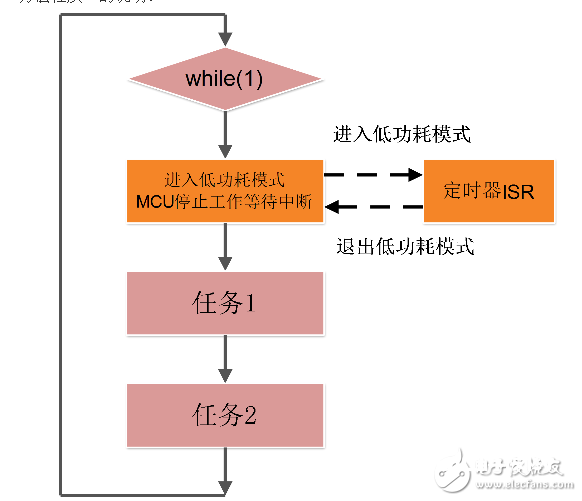
结合STM8谈谈低功耗MCU编程的基本思想-定时休眠是低功耗MCU常用的手段,定时休眠便是让MCU先休眠再工作,在休眠和工作之间不停转换。STM8有多种低功耗方式,例如等待模式便是其中的一种,等待模式时仅MCU停止工作,其他外设可正常工作。使用等待模式可以保证定时器或UART等可以正常的进入中断。当然也可以使用停止模式进一步降低功耗,在这里则使用等待模式做一个“方法性质”的说明。
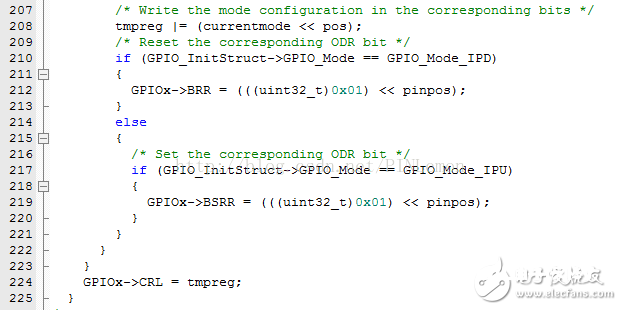
基于STM32单片机流水灯控制中的GPIO_Init()函数解析-学习STM32时,首先要熟悉流水灯例程,在这里就来分析流水灯中的GPIO_Init()函数
例如:流水灯例程中使用的端口是macLED1_GPIO_PORT=GPIOB,
控制的引脚是GPIO_Pin_0,
引脚的模式是GPIO_Mode_Out_PP(通用推挽输出),
引脚的速率是GPIO_Speed_50MHz,
用到的寄存器是CRL

PIC单片机的程序编写和空间分配时应注意哪些问题-控制部分采用PICl6F7X系列单片机,运用汇编语言编程,运行速度较快,能够达到系统的要求。在这里使用的大多是数字信号的控制,电机的控制只有开和合两种状态。在动作的过程中需要两只手臂、身体、头部、脚部等的协调动作。
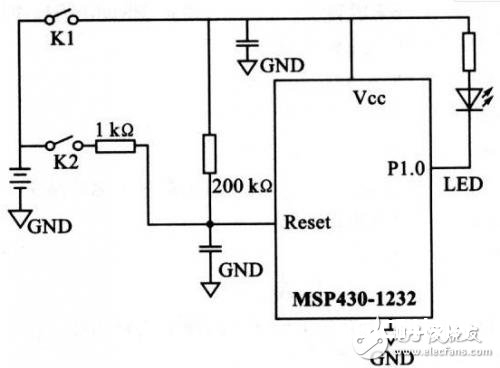
如何利用单片机看门狗定时器使led闪烁-看门狗是为了防止程序跑飞而设定的,但是由于看门狗是一个类似于定时器,因此可以把他当作定时器来使用
示例代码:用看门狗定时器使一个led闪烁
#include
void main( void )
{
// Stop watchdog timer to prevent TIme out reset
WDTCTL = WDT_MDLY_32;//宏定义
IE1 |=WDTIE; //允许看门狗定时器中断
P2DIR |= BIT7;
_BIS_SR(LPM0_bits+GIE);//在这里的话将cpu进入低功耗模式
单片机中PWM的工作原理解析-这是一个周期是10ms,即频率是 100Hz的波形,但是每个周期内,高低电平脉冲宽度各不相同,这就是PWM的本质。在这里大家要记住一个概念,叫做“占空比”。占空比是指高电平的时间占整个周期的比例。比如第一部分波形的占空比是 40%,第二部分波形占空比是 60%,第三部分波形占空比是 80%,这就是 PWM 的解释。
PIC单片机程序编写和动作标志位的使用方法解析-在这里使用的大多是数字信号的控制,电机的控制只有开和合两种状态。在动作的过程中需要两只手臂、身体、头部、脚部等的协调动作。整个控制系统比较复杂,因而在PIC程序编写和空间分配方面需要注意一些问题。

Xilinx DocNav工具的使用(文档查询利器)-DocNav(Documentation Navigator)可以看作是Xilinx的文档、视频“集装箱”,几乎所有与芯片、开发工具、设计方法、IP等相关的文档和视频都可以在这里找到,更重要的是它提供了一些快速查找资料的方法。 DocNav的安装: -可单独安装 -Vivado安装文件中已包含该软件,只需勾选即可 DocNav 概览: 打开该软件,在左上角会显示Catalog View和Design Hub View。Catalog View按芯片系列、开发工具、IP等将资料分门别类。Design Hub View则是从FPGA设计视角将文档分类的。
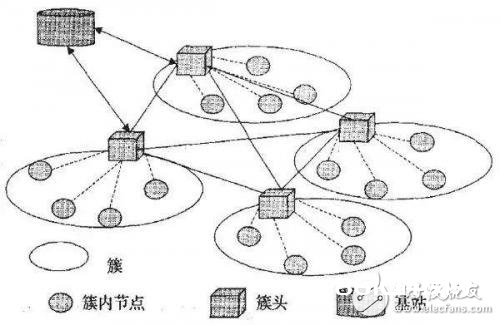
基于谐振器光学传感器的优特点介绍-在这里,我们首次演示了基于回音壁模式(WGM)光学谐振器的无线光子传感器节点,其中光通过连续的全内反射沿着球体、圆盘或环形等结构的圆形边缘传播。
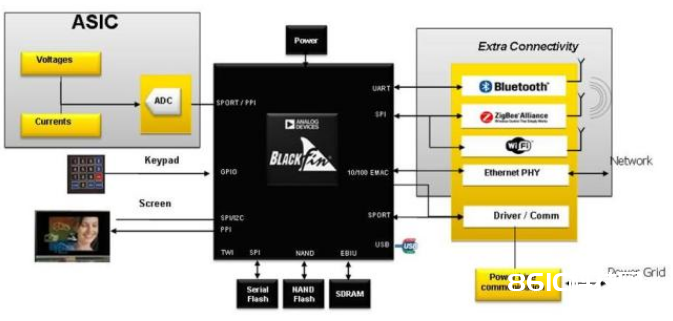
Blackfin处理器在图像处理方面的技术优势解析-在这里,传统的处理器供应商如ADI、TI、NXP等具有不可替代的竞争力。其中ADI公司专为满足当今嵌入式音视频和通信应用的计算要求及功耗约束条件而设计的新型嵌入式处理器Blackfin系列以其突出的性能表现而格外抢眼。
Linux配置在这里配置的对象并非内核而是软件至于网络的配置主要在安装系统是已经基本完成也可以进入GUI界面从菜单选择liloconf来配置与Windows一样在Lin
